“电力拖动自动控制系统”中的仿真教学
2010-06-12张敬南
张敬南
(哈尔滨工程大学自动化学院,黑龙江哈尔滨150001)
我校“电力拖动自动控制系统”课程是通过对电力拖动系统中电动机控制技术的讲授,使学生掌握电力拖动控制系统的构成、数学模型、参数设计以及不同干扰对控制系统的影响和控制系统在不同工况之间转换的过渡过程等知识。传统的教学一般只能从理论上进行分析,难以使用实验手段让学生获得感性认识,而在有限的实验学时的限制下,学生在实验环节上难以了解到各种因素变化给控制系统带来的具体影响。同时,真实的实验环境下,也很难实现各种错误设计和故障情况对控制系统影响的过程。由于仿真技术投资少,可以在极端条件下运行,为电力拖动控制系统的教学提供了有力的支持。
笔者从教学实践出发,将仿真技术引入到本科教学中,通过仿真教学案例探讨了在电力拖动自动控制系统教学过程中采用仿真教学的可行性和注意事项[1,2]。
1 仿真软件选择
选择适合仿真教学的仿真软件非常重要。Matlab的Simulink工具箱是以控制系统的传递函数为基础进行计算机仿真的工具[3]。目前,在国内外高校中,利用Matlab实现仿真已经成为学生必须掌握的基本技能。在设计研究单位和工业部门,Matlab已经成为研究和解决各种具体工程问题的一种标准软件。我校本科教学开设了相关Matlab软件的选修课程。
2 仿真教学案例
在教学过程中,可结合仿真分析不同情况下的控制系统所获得的运行效果。作为一个教学案例,在Matlab/Simulink仿真环境下完成构建晶闸管供电的转速、电流双闭环直流调速系统的仿真程序[4]。
系统参数为教材[5]例题所提供的参数。即直流电动机性能数据为:220V,136A,1460r/min,Ce=0.132Vmin/r,允许过载倍数λ=1.5。整流装置采用三相桥式电路,晶闸管装置放大系数40。电枢回路总电阻0.5Ψ。时间常数Tl=0.03s,Tm=0.18s。电流反馈系数β=0.05V/A,转速反馈系数为α=0.007Vmin/r。电流环滤波时间常数0.002s;转速环滤波时间常数0.01s。通过工程设计法设计调节器参数,电流调节器为

转速调节器为

2.1 整流装置输出电压与额定负载转速
完成转速和电流双闭环直流调速系统基本原理的讲授之后,可以布置给学生一个思考问题:某转速和电流双闭环直流调速系统在设计时限制整流装置输出电压不超过电动机的额定电压,若额定转速空载运行时突加额定负载,该系统能否回到额定转速运行?通过仿真获得转速变化曲线如图1所示,其中0.5s时起动电动机,2s时突加额定负载。从图1虚线可见转速显然没有回到额定转速上运行。
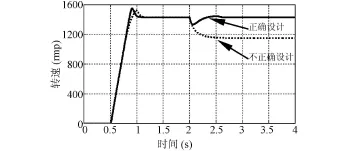
图1 整流装置输出电压对额定负载转速的影响
我们引导学生分析如下原因:由于整流装置设计的输出电压不超过电动机的额定电压,而主电路中还包括平波电抗器电阻,额定负载时使得电动机获得电压小于额定电压,系统不能回到额定转速。
在整流装置输出电压考虑平波电抗器电阻压降的影响后再次进行仿真,则系统能够回到额定转速,如图1中实线所示,验证了分析的正确性。
2.2 调节器限幅的设置
讲授PI调节器的设计时,设计调节器的限幅是非常重要的。教学时可以通过仿真引导学生分析为什么要设置调节器限幅。具体办法是采用相同的电力拖动自动控制系统进行理想空载起动的仿真。调节器在有和没有限幅两种情况下的电流曲线如图2所示。

图2 整流装置输出电压对额定负载转速的影响
与设置调节器限幅的系统相比,没有设置调节器限幅时,转速调节器在突加额定负载瞬间,输出的电流很高,已经超过了实际允许值。所以从仿真中很直观的看出限幅起到了限制最大值的保护作用。
如果调节器采用位置式调节器,则需要分别设置积分限幅和输出限幅。在此可以引导学生思考如果只设置了输出限幅,而没有设置积分限幅会引起什么后果。仿真结果如图3所示。

图3 调节器内限幅设置的影响
由仿真曲线可见,转速超调后,有积分限幅的系统的转速很快降低,调整给定转速;但是没有设置积分限幅的时候,转速超调后却没有及时的出现下降情况。原因在于调节器退饱和时,积分项仍然很大,产生了较大的退饱和超调。
2.3 反馈线断线的影响
在系统的实际操作中,可能会出现反馈线突然断线的情况,在教学中也可以通过仿真观测这种情况发生时产生的影响。现仍然以转速和电流双闭环直流调速系统为例,两个调节器均采用PI调节器。仿真研究当系统带额定负载稳定运行时,转速反馈线突然断线后转速、电枢电流、转速调节器和电流调节器输出变化的情况。仿真曲线如图4所示。
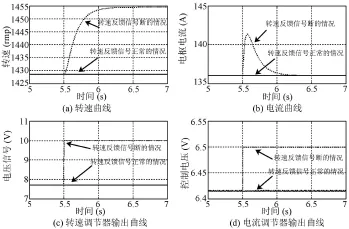
图4 反馈线断线时系统仿真
由仿真曲线可见,转速调节器ASR饱和、电流调节器ACR饱和;最大电压给定下的开环直流拖动系统,电枢电流等于负载电流,转速稳定。
3 教学改革的效果
3.1 对教学的辅助作用
通过仿真教学平台,学生可以直观看到参数的改变对实验现象的影响,还可以自行设计实验系统。
在实验教学方面,我校本科教学采用的实验装置为小功率的电机。学生缺乏大功率工业电机实验环境和条件,对那种大功率、高电压和大电流电机的实际认识。有了仿真教学的辅助,可以针对大功率电机的控制和运行进行仿真试验,且不必担心安全问题。
3.2 教学实践效果分析
应用仿真软件平台进行辅助教学在我院05级和06级电气工程及其自动化专业“电力拖动自动控制系统”的教学中进行了实践,获得了学生的好评。
学生通过仿真,加深了对系统的熟悉程度,硬件实验平台使用时,知道如何使用装置和如何调节。
通过仿真教学过程,学生熟悉和掌握了一种仿真工具,对于后续学习研究中接触到的先进控制理论(如神经控制和模糊控制等),有了很好的仿真验证手段。而且,学生针对复杂问题中不同参数或某一对象变化对系统的影响,以及不同参数间相互作用的关系的研究能力也有所提高。
3.3 引入仿真教学的注意事项
授课教师应避免将专业课讲成仿真课,仿真只是在某些关键或抽象问题上作为辅助教学手段。
仿真教学中选择仿真软件非常重要。在以往的教学中,笔者曾引导学生采用C语言进行仿真研究,效果并不理想。从而注意到必须选择学生容易学习、短时间能够熟练,并且在以后的专业实践中有应用价值的仿真软件。
考虑到学时限制和学生初步接触仿真软件等实际问题,仿真模型的搭建要力求简单实用。仿真初期不建议采用诸如Simulink中电力系统模块库中所提供的元器件模块搭建系统。
笔者认为应根据课程的特点,把仿真教学安放在三个环节中:①将仿真分析引入到课堂教学过程中,提升理论教学过程的吸引力和教学效果;②布置学生构建典型系统的仿真程序,研究系统特性,并开设讨论课进行交流探讨,提高学生研究和创新能力;③利用仿真程序预习实验内容,确保有限的实验时间里获得更好的实验效果。
4 结语
我们在“电力拖动自动控制系统”课程的教学过程中,通过引入直观的仿真教学,加深了学生对电力拖动自动控制系统的认识,对抽象难懂的专业理论分析有了深刻的理解,不仅验证了书本上的结论,还使学生掌握了参数或环节变化对控制系统运行的影响。另外,学生能够进行更复杂的系统分析,增强学生的学习兴趣,还可以改变该课程在以往的教学中面临脱离实际的困境。通过教学实践证明,教学过程中引入仿真教学手段获得了较好的教学效果,对于培养学生的思维能力和实践动手能力都有很大的帮助。
[1] 孙静,周元钧,张磊.基于 Matlab的电力系统仿真平台[J].南京:电气电子教学学报,2009,31(4):57-59
[2] 王云岭,高建树.仿真技术在课堂教学中的应用[J].天津:电力系统及其自动化学报,2004,16(2):77-79
[3] 薛定宇,陈阳泉.基于Matlab/Simulink的系统仿真技术与应用[M].北京:清华大学出版社,2002:1-7
[4] 洪乃刚.电力电子和电力拖动控制系统的Matlab仿真[M].北京:机械工业出版社,2009.1:163-169
[5] 陈伯时.电力拖动自动控制系统[M].北京:机械工业出版社,2005.1:79-83
