直线电机教学实验系统的研制
2010-06-12刘少克
刘少克
(国防科学技术大学,机电工程与自动化学院,湖南长沙410073)
随着城市轨道交通的发展,牵引用大功率直线感应电机在我国开始得到越来越广泛的应用[1,2]。与普通电机相比,牵引用直线感应电机具有功率大,极数较多,工作气隙大的特点。考虑建设成本,牵引用直线感应电机的短初级采用三相绕组,固定在车辆上,与车体一起运动;次级采用铁铝复合结构,沿轨道辅设,铝板厚度4~5mm,覆盖在铁板上,实验研究时通常采用旋转圆盘或圆弧形结构。
本文介绍的直线感应电机旋转圆盘式动态实验系统,对于普通旋转感应电机实验系统同样有借鉴作用。
1 实验系统各部分结构
实验系统由模拟直线电机、DSP控制系统、速度检测、电压电流检测和力测量系统等部分组成。
1)电机结构平台
实验系统短定子初级固定在安装架上,次级采用铝和钢复合圆盘型结构,且圆盘半径远大于初级长度。初级在水平方向固定,次级在电机牵引力的作用下可以连续旋转,如图1所示。

图1 直线感应电机实验系统照片
当圆盘足够大时,可以认为圆盘型直线感应电机的初级与次级之间做相对直线运动。另外,为了实验初、次级之间气隙的不同对电机特性的影响,实验装置中,初、次极之间的间隙可以调整。
2)DSP控制系统
DSP控制系统硬件包括主电路、控制电路和辅助电路三个部分。主电路由整流、滤波和IPM逆变电路组成。控制电路以DSP为核心控制器件,用来实现不同电机控制算法。辅助电路由键盘显示电路、保护电路以及电流、电压、速度和力检测电路等组成。
在主电路中,先将三相交流电整流滤波后,供给智能功率模块IPM。IPM将直流逆变为交流电供给初级三相绕组。逆变器采用IPM模块可节省外围电路,系统运行稳定,电机控制容易实现。
控制电路的核心器件是DSP,我们选用 TI公司的电机专用数字控制芯片 TMS320F240。该DSP负责采样初级相电流、电压以及电机牵引力和初次级之间的法向力,并计算电机的转速,获取转速指令、完成控制算法及逆变桥6个功率管的开关PWM信号的产生等功能。同时,DSP还监控实验系统的运行状态,当系统出现短路、过流和过压等故障时,DSP将封锁PWM 输出,使IPM停止工作,电机停止运行。
3)转速检测
速度的检测是在次级圆盘上安装齿盘实现的。齿盘上的光电开关产生脉冲,并送入DSP的捕获接口单元QEP。
速度计算采用M 测速法,即在某一采样时间内,通过对脉冲的计数来确定电机转速。设采样时间为Tn,齿盘齿数为P,在采样时间内测得的脉冲数为m,则电机转速 n(转/分,或rpm)为

4)电压电流检测
电压电流检测采用霍尔传感器,传感器输出模拟信号大小与输入待测量成正比,它既可以测量交流量,又可以测量直流量。反应速度快,性能稳定。
5)牵引力和法向力测量
牵引力和法向力测量采用拉压力传感器。该类传感器能将测出的拉压力值转换成相应比例的电压或电流输出,便于实验系统测控使用。将拉压力传感器的一端固定在实验平台的托架上,另外一端与电机的初级相连,调整传感器和电机初级的相对位置,使拉压力传感器的受力主轴与所测量力的方向一致,可以达到较好的测量精度,如图2所示[3]。
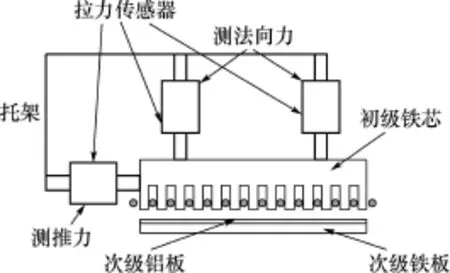
图2 直线感应电机牵引力和法向力测量方法
测量初、次级之间法向力采用两只拉压力传感器,这样在垂直方向上既起到固定和平衡的作用,同时也使拉压力传感器在垂直方向上受力均匀。
2 实验系统整体组成
整个教学实验系统的组成结构框图如图3所示。

图3 实验系统组成结构图
图3中输入速度指令为一模拟量,通过A/D转换为数字量,此数字量输入到DSP控制系统中,通过适当控制算法计算得到6路PWM信号;此6路PWM信号通过隔离驱动电路加到IPM上,从而产生三相调制电压,以驱动直线感应电机。
该教学实验系统由于加入了速度和电流检测,可实现速度和电流的闭环控制。有关控制算法通过DSP编程实现,可以由学生完成,在演示性实验中也可由教师预先编程。测力传感器的加入,使实验系统还可进行电机特性的测量。
3 实验实例
笔者构建了一个实验装置,用于检测初、次级之间空气气隙长度的不同对电机特性的影响,该装置中的初、次极之间距离可以调整,其调整范围从3~10mm。装置电机额定电压 30V,额定功率0.24kW,频率 50Hz;初级长度320mm,初级宽度70mm;次级圆盘直径620mm,次级铝板厚度3mm,次级铁板厚度10mm。
在该装置上进行电机控制算法研究。当神经网络用于直线电机速度观测时,其观测原理框图如图4所示。
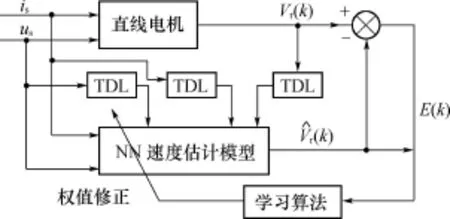
图4 神经网络速度观测原理框图
图4中TDL表示单位延迟环节,Vr(k)为速度,us、is为输入电压和电流。对应不同的神经网络算法和NN速度估计模型,可以选择不同的神经网络结构。图中电机输入输出的非线性关系离散化后可以表示为

上述非线性关系可以由神经网络来映射:通过训练神经网络,使其按任一精度逼近直线感应电机系统,从而映射原系统的非线性关系,估计电机的实际速度。
根据实验检测一组输入输出数据(即初级电压、电流和相应的速度)作为神经网络的初始训练样本。利用上述神经网络算法,估算不同运行情况下的电机运行速度。作为例子,图5和图6分别示出了起动过程中,用径向基函数RBF神经网络对上述实验平台转速进行估计,在次级稳态速度n=150rpm和n=195rpm时的估计速度曲线和实际速度曲线。
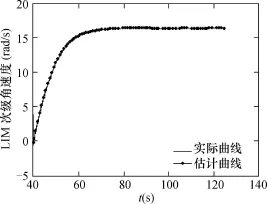
图5 n=150rpm,RBF网络训练结果
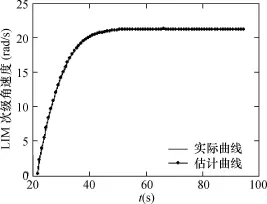
图6 n=194rpm,RBF网络训练结果
由图5和图6可见,使用RBF网络很好地估计了圆盘的速度。网络训练中用训练输出和输出样本T之间的均方差MSE来作为训练误差,设定训练目标为MSE=0.01。
计算同时表明,采用不同的神经网络算法在收敛速度和估计准确性方面存在一定的差别。采用BP网络梯度算法最终训练误差较大,而采用BP网络Levenberg-Marquardt算法能够达到训练目标,只是学习时间长一些;两种BP网络算法中,L-M算法估计与实测更接近。RBF网络具有短的学习时间,在训练时间和最终训练误差方面具有明显的优势。
4 结语
本文介绍了一种直线感应电机实验系统的组成,对实验系统各个组成部分的硬件结构进行了描述,并针对神经网格控制算法在电机速度估计方面的应用进行了研究。利用该系统,可对直线感应电机的电磁力及其控制特性进行实验研究。
[1] 叶云岳.直线电机原理与应用[M].北京:机械工业出版社,2000
[2] Syunzo Ishimoto,Masato Kato.The First Urban Maglev T ransport Application Japan.Maglev2004 Proceedings[C],2004,Vol.1:298-306
[3] 刘少克,罗昆.中低速磁悬浮列车用直线电机法向作用力实验研究[J].株州:机车电传动,2003,No.1,,No.32-34
[4] 冯垛生,曾岳南.无速度传感器矢量控制原理与实践[M].北京:机械工业出版社,2001
[5] 胡崇岳.现代交流调速技术[M].北京:机械工业出版社,2003
