CBERS-02B卫星TDICCD相机的相对辐射定标方法及结果
2010-06-11何红艳王小勇宗云花
何红艳 王小勇 宗云花
(北京空间机电研究所,北京100076)
1 引言
随着光电探测技术和高分辨率相机的发展,TDICCD相机已成为发展方向,广泛应用于航天遥感领域。航天遥感相机的辐射定标虽然不直接参与获取遥感图像,但在确定图像数据的品质方面起着重要的作用。它使遥感信息真实、定量[1-2],是遥感信息定量化关键的一步。辐射定标有绝对定标和相对定标2种方式,绝对定标的目的是建立遥感器获取的测量值与相应实际值之间的关系;相对定标是校正由遥感器成像通道中各个探测器(如每片CCD)之间的响应及偏置的不均匀性、每个探测元的固有响应和暗电流的不一致性以及探测器外围电路特征差异的响应不一致性所造成的图像采集误差。
与普通线阵CCD相机相比,TDICCD相机的辐射定标要复杂得多,主要由TDICCD的特殊性引起。首先,为了适应不同成像条件下的理想成像,TDICCD相机在轨期间将采用多种TDI积分级数和电路增益组合的成像模式;另外,由于TDICCD成像的同步要求[3],成像过程中相机的积分时间需要定期更新和变化,以适应TDICCD相机的成像需要。
由于TDI积分级数、积分时间和增益为3个独立的参数,各种组合模式很多,可以多达上百种(具体见表1),在辐射定标试验中很难采集各种组合模式下的定标数据。因此,如何在地面进行辐射定标试验以获取必要的定标数据,如何选择合适的定标数据以适应相机参数不断变化的辐射定标,是TDICCD相机必须要解决的问题。
中巴合作的CBERS-02B卫星于2007年9月成功发射,卫星在01、02星的基础上新配置了一台高分辨率TDICCD相机(HR相机)[4]。相机的星下点地面像元分辨率为2.36m,图像采用8bit数字量化,并进行了8∶1压缩。根据HR相机的设计情况,卫星在轨运行期间相机参数使用情况如表1所示。
相机焦面采用3片TDICCD器件视场拼接的方式。其中,TDICCD器件的主要参数如表2所示。

表2 HR相机焦面探测器参数
本文根据TDICCD相机的成像特点,结合HR相机的特殊性,对HR相机的辐射定标试验方案进行介绍,并对试验结果进行分析和比较,最后给出了HR相机的在轨相对辐射校正方案,该方案已经成功应用于HR图像数据的后期处理。
2 HR相机的相对辐射定标方法
2.1 相对辐射定标原理
理想状态下,TDICCD相机中的每一个像元的输出灰度值与入射的辐亮度成正比,且有相同的比例因子;当相机入瞳处的入射光完全均匀一致时,每一像元的输出灰度值应完全相同。但实际上,由于各种因素的影响,如光学系统、不同视场及视场拼接的影响,TDICCD探测器各片、各抽头、各像元的响应不一致性以及电路的差异,这些因素都会导致理想的对应关系不存在,常常出现偏差,在图像上表现为条带,使目标失真,影响视觉效果和对目标的分辨与解释。
相对辐射定标的目的就是根据定标数据,找出各像元的不一致性,并给出每个像元的辐射校正系数。根据辐射校正系数,剔除各像元的差异,还原图像的真实性,确保相机对均匀目标成像时输出的是均匀图像。
目前常用的实验室辐射定标方法为积分球定标法,定标框图如图1所示。
采用稳定性、面均匀性和漫射特性均满足定标要求的积分球作为相机的标准光源,为相机提供不同挡、已知辐亮度的均匀光源[5]。根据采集的定标图像,用最小二乘拟合的方法,求出相机各像元的相对辐射校正系数。
由于HR相机的系统响应线性度非常好,相对辐射校正算法可采用线性拟合,具体计算方法和过程如下:
首先,根据积分球的光谱辐亮度、相机参数和定标数据,求出各探测器像元在特定相机参数组合下(定义为TDI积分级数、积分时间和增益三个相机参数的组合,下同)的响应系数;然后,根据响应系数求出各探测器像元的相对定标系数。

图1 实验室辐射定标试验设备安装示意图
具体计算过程如下:
第一步,计算响应系数K(n)和c(n),

式中 n为探测器像元序号;c(n)为第n像元的偏置;Ic(n)为第n像元的实际输出,对应定标数据中该单元的输出灰度值的多行统计平均值;K(n)为第n像元的响应系数;L为等效辐亮度。
第二步,计算归一化因子k(n),

式中 k(n)为第n像元的归一化因子;K(n)表示所有探测器单元的响应系数均值。
通过上述步骤,可以计算出每个相机参数组合下的各像元的相对定标系数[k(n),c(n)]。根据定标系数,可以对获取的图像进行相对辐射校正,得到校正后的图像。
2.2 TDICCD相机的相对辐射定标方法
对于线阵CCD相机,相机参数一般只有增益可调,所以在线阵CCD相机的相对辐射定标中,可以采集每挡增益的定标数据,然后得到各挡增益的定标系数。不同增益的原始图像用对应的定标系数进行相对辐射校正即可。
但对于TDICCD相机,由于相机TDI积分级数、积分时间、增益的各种参数组合多达上百种,很难在辐射定标试验中采集所有相机参数组合下的定标数据。所以,需要探讨不同参数组合下的相对定标系数是否具有一致性,如:
1)不同TDI积分级数的相对辐射定标系数是否一致(积分时间和增益保持不变);
2)不同积分时间的相对辐射定标系数是否一致(TDI积分级数和增益保持不变);
3)不同增益的相对辐射定标系数是否一致(TDI积分级数和积分时间保持不变)。
如果上述3种可能中有一种情况一致,就可以大大减少辐射定标的工作量,尤其是不同积分时间的相对辐射定标系数一致的情况。下面从成像原理上来讨论上述3种可能性。
根据相机及TDICCD器件的工作原理,理论上TDICCD相机的输出与TDI积分级数N、积分时间t和增益G成正比,相机输出为:

式中 K0为响应系数。
考虑到TDICCD探测器的暗信号c0,相机输出为:

结合公式(1)、(2)、(4),可以得出以下结论:
1)如果TDI积分级数N和增益G相同,不同积分时间t的相对辐射定标系数一致;
2)如果积分时间 t和增益G相同,在TDICCD暗信号为零且TDICCD多行像元响应一致时,不同TDI积分级数的相对辐射定标系数一致,否则不一致;
3)如果TDI积分级数N和积分时间t相同,在TDICCD暗信号为零且各抽头响应一致时,不同增益G的相对辐射定标系数一致,否则不一致。
根据上述分析结果,可以确定:对于系统响应为线性的TDICCD相机,不同积分时间的相对辐射定标系数一致,即原始图像可以用不同积分时间的相对辐射定标系数进行相对辐射校正。如果TDICCD暗信号不为零,不同增益和TDI积分级数的相对辐射定标系数不一致。
由于相机参数组合中,积分时间的挡数最多,且在轨需要定期更新。根据分析结果,可以大量减少辐射定标试验中需采集的定标数据(对于HR相机,定标数据减少为原来的1/40),并可以解决TDICCD相机在轨成像时积分时间不断更新的定标问题。
根据上述结论,在辐射定标试验中,只需采集一种积分时间下不同TDI级数和增益组合下的定标数据即可,从原来需要采集360种组合变为最多只需要采集9种组合下的定标数据。
下面从HR相机的系统响应曲线和实际辐射校正结果两个方面进行验证。
3 HR相机不同积分时间的系统响应系数分析比较
根据相对辐射定标方法分析结果结合TDICCD的特性,在HR相机辐射定标试验中,采集了3种积分时间(0.351ms,0.364ms,0.377ms)、3种TDI级数(12级、24级、36级)、3种增益(1倍、1.5倍、2倍)共27种组合情况下的辐射定标数据。
通过分析HR相机的辐射定标数据,可以判定相机是否满足前面的理论推导结果。按照公式(4),在TDI级数和增益不变的情况下,各像元的系统响应应该满足:
1)改变积分时间,TDICCD各像元的暗信号保持不变;
2)改变积分时间,TDICCD各像元的响应系数按照同一比例变化。
根据相机的具体辐射定标试验数据,给出了不同积分时间下相机的系统响应情况。在TDI级数12,增益为1时,3个不同积分时间的系统响应曲线如图2所示(随机选取一像元)。

图2 不同积分时间的系统响应曲线
通过响应曲线可以看出:不同积分时间的系统响应曲线呈线性,具体的斜率和偏置如表3(每片TDICCD随意选取1个像元)。

表3 不同积分时间的响应系数比较
通过表中数据可以看出,不同积分时间的系统响应与分析结果一致。即:改变积分时间,TDICCD各像元的暗信号基本保持不变,且各像元的响应系数按照同一比例变化。
4 HR相机不同积分时间的相对辐射校正效果
为了验证前面的理论分析结果——在TDI积分级数和增益相同的情况下,不同积分时间的相对辐射定标系数一致,可以互相校正的结论,进行了下面的试验。
对于同一幅原始定标图像,用自身积分时间的定标系数及其它积分时间的定标系数来校正。其中TDI级数和增益保持不变,如相机TDI级数12级、积分时间0.364ms、增益1(简写12- 0.364- 1,后同)的原始图像分别用相机参数12- 0.364- 1的定标系数和12- 0.351- 1的定标系数来校正,每个积分时间均选取了两个TDI级数(N=12和N=24)的图像。通过比较校正后的图像,判定相对辐射校正的效果。
4.1 校正前后定标图像比较
在TDI级数N=12和N=24,增益G=1条件下,用积分时间t=0.364ms和t=0.351ms的定标系数来校正积分时间t=0.364ms原始图像,校正结果见图3和图4。

图3 TDI级数N=12的辐射校正前后图像

图4 TDI级数N=24的辐射校正前后图像
通过对校正前后图像的比较发现:带有条带的原始图像经定标系数校正后变得灰度均匀、一致,相对辐射校正效果明显。
4.2 校正前后数据比较
在积分时间 t=0.364ms、t=0.377ms下,分别选取两幅灰度值不同的图像(图像1、图像2),用不同积分时间定标系数进行校正,校正后的图像均值和标准偏差见表4和表5。
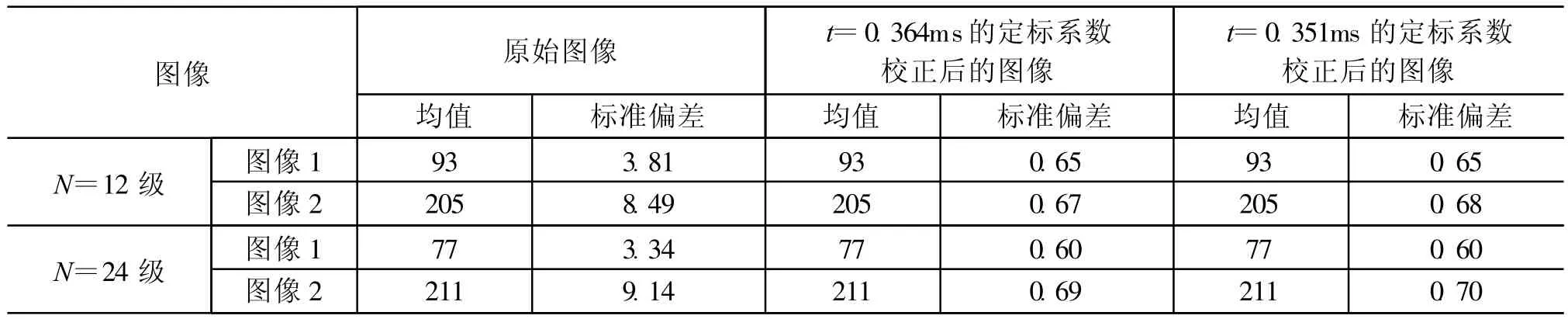
表4 积分时间t=0.364ms的定标图像辐射校正前后图像数据比较 DN

表5 积分时间t=0.377ms的定标图像辐射校正前后图像数据比较 DN
对表中校正前后图像数据进行比较,可看出:
1)相对辐射校正效果明显,校正后图像的标准偏差明显变小;
2)用不同积分时间的定标系数校正后,图像均值和标准偏差一致,校正效果相同;
3)在TDI级数N=12和N=24级时,上述规律一致。
试验中对其它TDI级数和增益组合情况,也进行了不同积分时间的定标系数校正效果分析比较,结果与上面一致。在此,不再列举图像和分析比较数据。
通过HR相机的相对辐射定标试验及相对辐射校正前后图像的具体分析比较,发现:试验结果与分析结论一致,即在TDI级数和增益保持不变的情况下,不同积分时间的定标系数一致。
5 HR相机的在轨相对辐射校正方案
HR相机的在轨相对辐射校正方案完全采用上面的分析结论和试验结果。虽然在发射前采集了3种积分时间、3种TDI级数和3种增益共27种组合的辐射定标数据,但由于不同积分时间的相对辐射定标系数一致,所以在轨应用中使用9种相对辐射定标系数。
原始卫星图像的相对辐射校正采用对应TDI级数和增益下的相对辐射定标系数,如所有TDI级数为12,增益为1的卫星图像均采用12-0.364-1的相对辐射定标系数。
卫星在轨运行以来,采用该方案可以很好地解决HR相机图像的相对辐射校正问题,能满足相对辐射定标精度。
6 结束语
本文首先从TDICCD相机的相对辐射定标原理出发,分析了TDICCD相机的相对辐射定标系数的特点,得到以下结论:对于系统响应为线性的TDICCD相机,不同积分时间的相对辐射定标系数一致,不同积分时间的卫星图像可以用同一个相对辐射定标系数进行校正。然后,结合HR相机的实际辐射定标数据,对上述结论进行了验证,结果表明分析结论和试验结果一致。
该结论大量减少了TDICCD相机的辐射定标工作量,解决了TDICCD相机的在轨相对辐射校正问题,已经成功应用于HR图像数据的相对辐射校正,对于其它类似TDICCD相机的相对辐射校正具有参考意义。
[1]Delwart S,Bourg L.Radiometric Calibration of MERIS[J].SPIE,2004,5570:372-380.
[2]Delwart S,Huot J P,Bourg L.Calibration and Early Results of MERIS on ENVISAT[J].SPIE,2003,4881:337-344.
[3]Baltsavias E,Pateraki M,Zhang Li.Radiometric and Geometric Evaluation of IKONOS GEO Image andTheir Use for 3D Building Modeling:Joint ISPRS Workshop:Proceedings of High Resolution Mapping from Space 2001[C].Germany Hannover,2001.
[4]王小勇.资源一号02B卫星HR相机研制与在轨运行情况[C],2008年光学大会论文集,泉州,2008.
[5]陈世平.空间相机设计与试验[M].北京:宇航出版社,2003.
