永磁同步电机驱动控制器和调制方式
2010-06-02李锦英付承毓陈兴龙包启亮
李锦英, 付承毓, 陈兴龙, 包启亮
(1.中国科学院光电技术研究所,四川成都 610209;2.中国科学院光束控制重点实验室,四川成都 610209;3.中国科学院研究生院,北京 100049)
0 引言
直流电机由于电刷和换向器的存在,励磁磁场和电枢磁动势始终正交,通过调节电枢电流来直接控制电磁转矩,所以其控制简单、响应快,在高精度伺服系统中一直占有重要地位。但同时它们会产生火花,这在易燃、易爆场合是不允许的,且影响电机寿命。
随着永磁材料、电力电子技术、控制方法的不断进步,交流无刷电机逐渐显示出其体积小、转矩高、调速范围宽、坚固耐用等优点。尤其是永磁同步电机 (Permanent Magnet Synchronous Motor,PMSM),磁场和反电势都是正弦信号,使其具有更小的纹波。在高性能应用场合,如机器人和高精度数控机床和航空航天领域中,PMSM都得到了广泛应用[1]。本文详细分析了PMSM的工作原理,建立了速度、电流双闭环系统,并就电流环的几种调制方式作分析和比较。
1 PMSM控制基本原理
任何电机调速控制的关键都是对转矩的控制。电磁转矩正比于定、转子磁势矢量的幅值与其夹角正弦的乘积[2],即:

显然,在对PMSM控制中应使δ=90°,才能得到最大的转矩输出。
在PMSM中,三相对称定子中通入三相对称正弦电流ia、ib、ic,将产生旋转磁动势。通过下面的矩阵变换可以将iabc变换为idq:
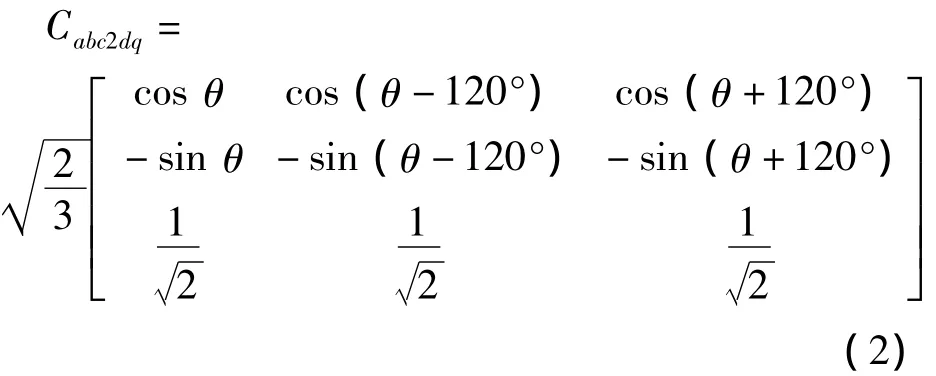
式中:θ——转子电角度。
由逆矩阵C-1abc2dq可以实现idq到iabc的变换。
经过旋转坐标变化,实现了对电压、电流和磁势等矢量的解耦控制。若取id=0,则Te∝iq,此时只需控制iq的大小即可达到控制电磁转矩的目的,控制方式得以简化。
2 PMSM仿真系统的建立
MATLAB/Simulink和SimPowerSystems中含有丰富的模块库,搭建控制系统非常方便,下面利用它们来建立PMSM系统。如图1所示。图1中采用id=0的控制方式,建立了电流、速度双闭环控制系统。主要包括:电流控制器ACR、速度控制器ASR、坐标变换模块dq2abc/abc2dq、逆变器模块、PMSM、测量模块、脉宽调制(Pulse Width Modulation,PWM)模块等。
PMSM控制的关键是对电枢电流的控制。电流环要求快速性,控制器采用PI控制,并加上限幅保护环节;另外,电流环要求提高逆变器直流电压利用率和降低电枢电流的谐波含量。这主要与PWM方式有关。
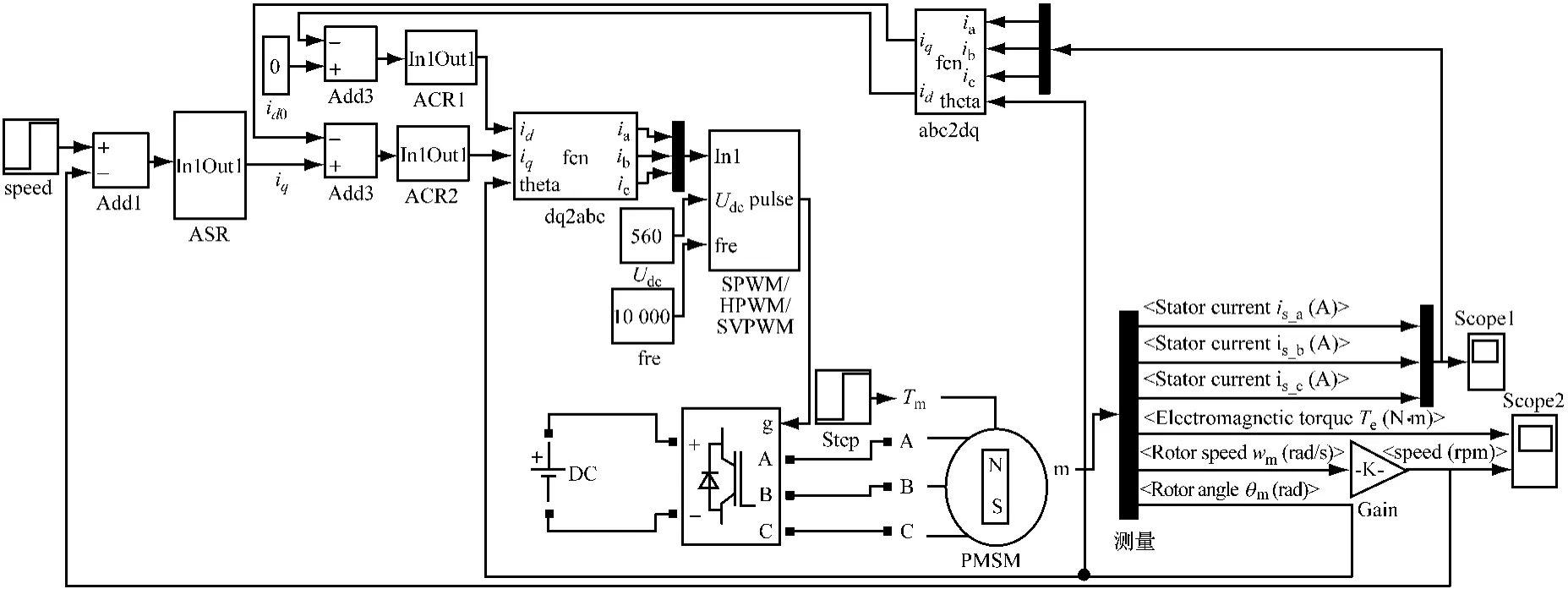
图1 PMSM系统仿真模型图
3 PWM模块原理分析与优化
PWM技术的理论基础是面积等效原理,即冲量相等而形状不同的窄脉冲加在具有惯性的环节上,其效果基本相同[3]。随着绝缘栅双极晶体管、智能功率模块的发展,开关频率可达到20 kHz以上,使得PWM技术得到更加广泛的发展和应用,其中最具代表性的有正弦脉宽调制(Sin-Wave PWM,SPWM)和空间矢量脉宽调制(Space Vector PWM,SVPWM)。
SPWM是一种脉冲宽度按正弦规律变化而和正弦波等效的PWM技术。通过正弦波调制信号与三角波载波信号比较而获得PWM开关信号,由它们的交点确定逆变器开关器件的通断时刻。
图2为电压源型三相桥式逆变电路原理图。三相输出端U、V、W相对于直流回路中点的电压分别为Ud/2和-Ud/2,输出的线电压为Ud、-Ud和0。对于SPWM,相电压的最大值就是Ud/2,线电压的幅值是Ud/2,电压利用率只有86.6%。因此,SPWM具有原理简单,便于实现等优点,但电压利用率低是其最大的缺点。
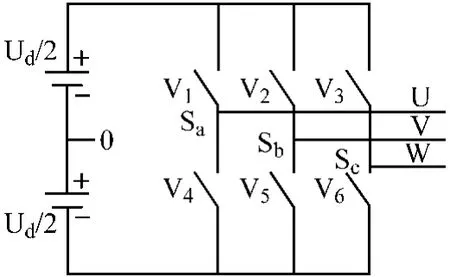
图2 电压源型三相桥式逆变器
SVPWM从电机角度出发,着眼于产生幅值恒定的空间旋转磁场,具有谐波低,转矩脉动小的特点,并且由于添加了零矢量,具有电压利用率高的优点(相电压基波幅值为Ud/、线电压幅值为Ud,比SPWM高15.47%),得到了广泛应用。但具体实现较复杂,可以参考文献[4-5]。
研究表明[6-7],在正弦波参考信号中注入一定的三次谐波,再与三角载波相比较,得到的调制信号可以等效成SVPWM。由于它具有SPWM简单易用的优点,同时具有SVPWM电压利用率高的特点,因此叫混合脉宽调制(Hybrid PWM,HPWM)。其具体原理如下。

式中:0≤k≤1,Uabc为正弦调制信号,Uz为注入的三次谐波信号,Uabc*为注入谐波之后的非正弦调制信号,得到的Uabc*再与三角载波比较,得到PWM开关信号。k取值不同时,HPWM具有不同的特点。当k=0或1时,开关次数将减少1/3,但谐波含量稍大;当k=0.5时,HPWM将与SVPWM具有相同的电压利用率,比SPWM提高15.47%。
具体波形如图3所示。设正弦波注入三次谐波后,峰值为Ud/2,如图3中马鞍形曲线Uabc*所示,但它所含有的基波峰值为Ud/,如图中Uabc所示。因此当三角载波幅值一定时,Uabc*所对应的基波幅值更大,可以有更大的线性调制范围。
同时,由于电机一般是Y型连接,线电压中不会含有三次谐波(见图4),线电压幅值变为Ud,与SVPWM的相同。
三种调制方式的电枢电流频谱特性如图5~7所示。由图可知SPWM的谐波最大,HPWM次之,SVPWM最小。
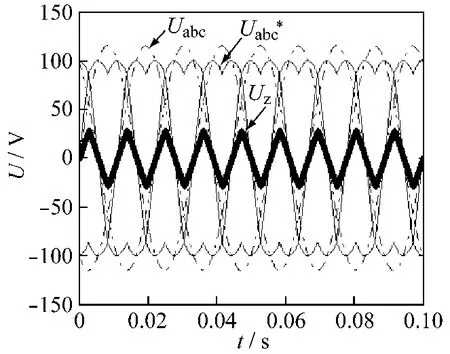
图3 HPWM产生原理
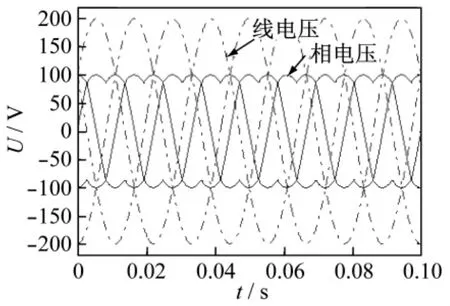
图4 HPWM相电压与线电压波形图
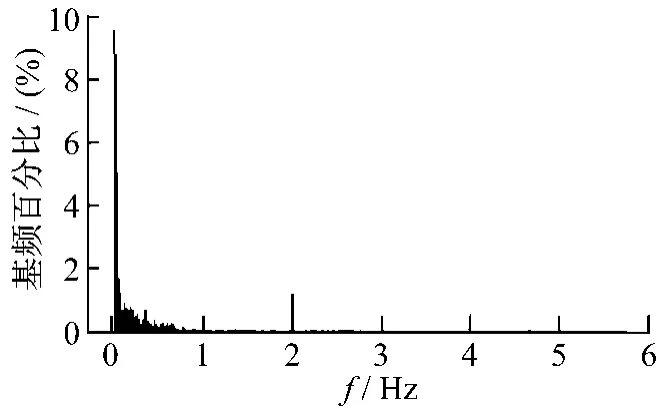
图5 SPWM电枢电流频谱特性
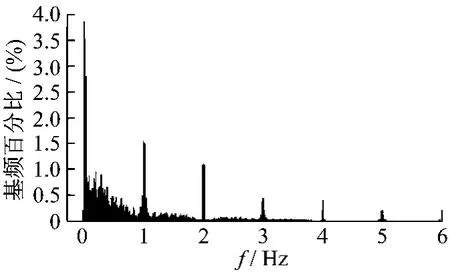
图6 HPWM电枢电流频谱特性
4 PMSM双闭环仿真结果与分析
下面分析SPWM、HPWM和SVPWM在速度、电流双闭环系统中对电磁转矩和速度的影响。
速度控制器采用PI算法时,积分环节会造成典型的积分饱和现象,造成系统超调,过渡时间变长。本文采用积分分离式PI算法[8],当控制量与设定值偏差较大时,取消积分作用;当偏差小于给定值时,使积分器作用。以免由于积分作用使系统稳定性降低、超调增大、甚至引起较大的振荡。
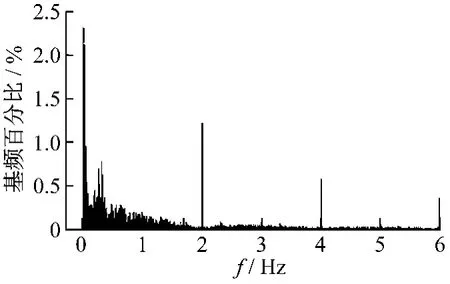
图7 SVPWM电枢电流频谱特性
图8给出了PI算法和积分分离式PI算法的速度、电磁转矩仿真结果。给定转速为500 r/min,0.1 s时加入50 N·m的扰动力矩。仿真结果验证了积分分离式PI的有效性。
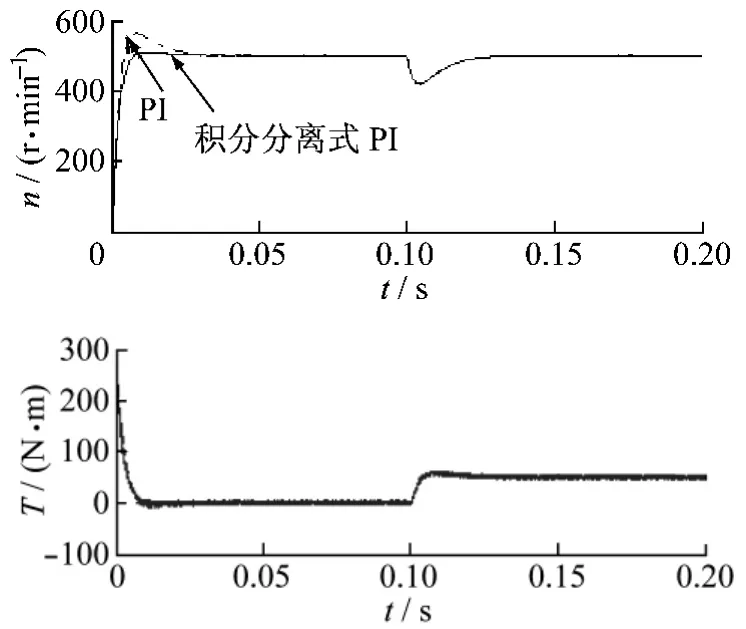
图8 PI和积分分离式PI对应的转速、转矩波形
图9给出了速度控制器采用积分分离式PI算法时,三种不同的调制方式所对应的转速和转矩波形。从仿真结果可以看出,动、静态特性上SVPWM最好,HPWM次之,SPWM最差,这也与之前的分析相吻合。
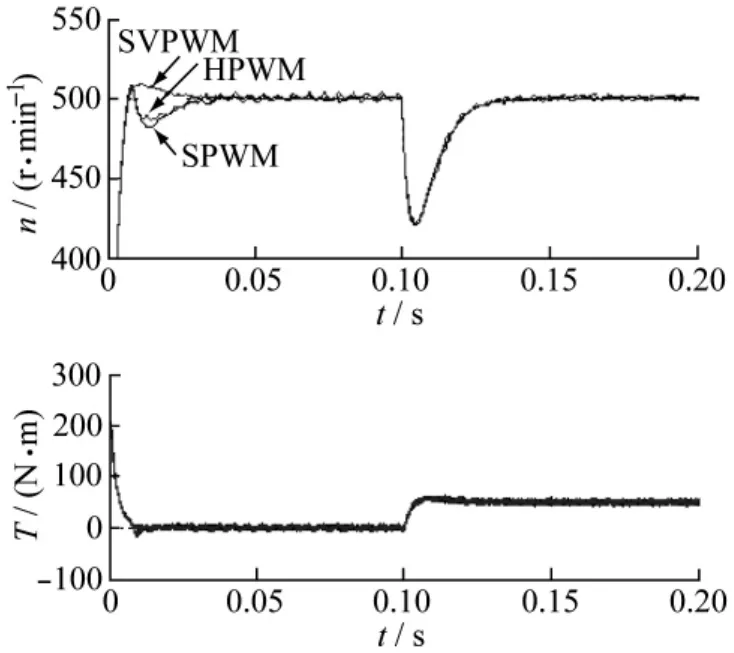
图9 SPWM,HPWM和SVPWM所对应的转速、转矩波形
5 结语
本文建立了PMSM双闭环仿真系统,速度环采用抗积分饱和的PI算法,在不增大稳态误差的前提下,解决了超调问题。研究了电流环的三种调制方式,并在电机双闭环系统中进行了仿真。结果表明,SPWM算法简单,便于模拟和数字实现,谐波含量高,电压利用率低;HPWM算法简单,便于模拟和数字实现,谐波含量低,电压利用率比SPWM高15%;SVPWM算法稍复杂,便于数字实现,谐波含量最低,电压利用率和HPWM相同。在电机双闭环系统中的仿真结果表明:选用SVPWM算法时,电机的动、静态特性要稍好,HPWM次之,SPWM最差。但由于SVPWM需数字实现,要引入A/D、D/A,增加了系统复杂性,同时受采样频率的限制;而HPWM用模拟板实现时,具有简单、速度快的优势。总之,仿真系统的建立为下一步试验系统的设计提供了思路,并为验证更为复杂的控制算法提供了基础。
[1]郭庆鼎,孙宜标,王丽梅.现代永磁电动机交流伺服系统[M].北京:中国电力出版社,2006.
[2]高波,沈靖,王贵.永磁交流伺服技术第一讲永磁同步电动机控制基本原理[J].微电机,1996,29(1):43-46.
[3]王兆安,黄俊.电力电子技术[M].北京:机械工业出版社,2009.
[4]魏昌洲,薛重德,翟红存.基于SVPWM变频调速系统的建模与仿真[J].中小型电机,2005,32(3):45-48.
[5]康现伟,于克训,刘志华.空间矢量脉宽调制仿真及其谐波分析[J].电气传动自动化,2005,27(1):11-13.
[6]熊健,康勇,张凯,等.电压空间矢量调制与常规SPWM的比较研究[J].电力电子技术,1999(1):25-28.
[7]Vladimir Blasko.Analysis of a hybrid PWM based on modified space-vector and triangle-comparison methods[J].IEEE Trans Ind Applicat,1997(33):756-764.
[8]夏长亮.无刷直流电机控制系统[M].北京:科学出版社,2009.
