路面平整度检测方法研究
2010-05-29徐永新
徐永新,周 严
(江苏安达工程咨询监理有限公司,江苏 淮安 223000)
1 概 述
路面平整度是衡量高等级路面质量好坏的重要指标。路面不平顺,会增大行车阻力,并使车辆产生附加振动,直接影响行车的安全性、舒适性,附加振动和不平整的路面所滞积的雨水,也将加速路面的破坏。国际平整度指数IRI作为道路平整度测量的标准尺度已被广泛采用,它是以四分之一车在速度为80 km/h时的值定为IRI值,单位用m/km。IRI其实是一个无量纲的指数,因为它来自于四分之一车模拟统计值,但习惯上用m/km表示。我国《公路路基路面现场测试规程》规定要求采用连续式平整度仪量测路面的不平整度的标准差σ,以表示路面的平整度,以mm计。
目前,公路施工质量控制与检查验收中,广泛采用的测试设备有传统的3m直尺、连续式平整度仪和车载式颠簸累积仪。这些测试设备存在不足,如3m直尺检测精度低、检测效率低、代表性差且检测时需低头弯腰、工作量大;连续式平整度仪仪器的机械性能对数据的精度影响较大,测试速度对于实际行车速度较快的高等级公路的大面积检测仍受限制;车载式颠簸累积仪时间稳定性差、转换性差、不能给出路面的真实断面。
2 Dynatest 5051 RSP平整度测试车结构组成及工作原理
Dynatest 5051 RSP道路激光平整度测试车是中国在20世纪90年代引进的一种先进设备,是目前世界上最先进的路面平整度测试设备之一。它克服了目前使用的设备存在的一些缺点,对高等级公路的快速发展和路面管理系统的不断完善具有明显的实际意义。
2.1 结构组成
DYNATEST 5051RSP激光平整度测试车是丹麦在英国TRRL激光平整度仪基础上研制生产的一种非接触式平整度测试设备。测试车外形如图1所示,主要结构组成如图2所示。
系统处理器主要用于控制激光发生器,并收集由集光器传送的电信号,加以放大、转换、数据处理,得到路面与光平面的差值。激光器包括激光发生器和集光器,均安装在测试车前端横杠内,用于发射和收集激光束,确定光时差。距离传感器用来测定测试车的行驶距离并传送到系统处理器来控制激光器。便携式电脑连接在系统处理器上,通过系统软件控制整个测试过程,并用以存贮标定参数及经系统处理器处理、传送的路面高程差,利用系统软件计算需要的国际平整度指数IRI值。标准的测定速度规定为80 km/h,测定结果以m/km表示。
图1 激光平整度测试车外形图
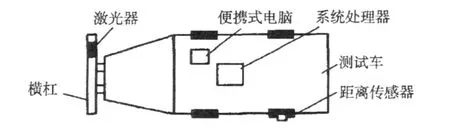
图2 测试车的主要结构图
2.2 测试车工作原理
DYNATEST 5051RSP道路激光平整度测试车是利用激光的光时差原理来测定路面的凹凸状况。其工作原理框图如图3所示。
使用RSP进行测试前,要进行标定。全部标定过程中都根据提供的软件来完成,并将参数存贮到系统软件中。经标定的测试车,启动系统处理器,通过便携式电脑输入各参数 (如测段长、起始位置、数据收集模式等),测试系统处于待测状态。测车从检测路段前方约250 m位置开始行驶,作为预运行,以某一恒定速度进入测段后开始收集数据,距离传感器测定行驶距离,通过系统控制激光发生器以0.16 m间距发射激光束,经路面反射后由集光器接收,该过程的光时差经放大器、模数转换器及数字处理器得到路面与光平面的差值di(0.1 mm),输出到便携式电脑中贮存,再经运行系统自身的系统软件处理可得到所需要间距段内的国际平整度指标IRI值 (m/km)。测试全过程均由程序自动控制,具有操作简便、测速高 (80 km/h以上)、测试精度高 (0.1 mm级)、采集样点密(0.16 m间距取样)、代表性强的优点,很适宜于高等级公路实际行车速度高、平整度要求高的特点,对其大面积的快速质量检测评定具有实际意义。
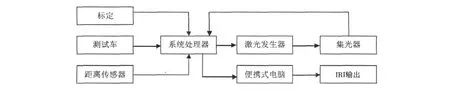
图3 测试车测试原理
3 平整度指标间相关关系
3.1 数据拟合
为了进行标定试验,选择的测试路段应满足以下要求:
(1)标定路段应有代表性,能覆盖路网内平整度变化范围;
(2)路段应为直线 (或小曲率)和单坡;
(3)路段内平整度均匀;
(4)尽量选交通少的路,以减少标定时来往车辆的干扰;
(5)路段最小长度为200 m。
用激光平整度测试车和XLPY—E型连续式平整度仪 (简称八轮仪)同时测定路面的平整度,每100 m输出一个结果。采用样本统计均方差分析,使用±1σ来舍弃异常值。其检测结果见表1。
对原始实测数据进行线性、抛物线、指数曲线、幂指数曲线回归分析,相关性较好的为直线,其拟合曲线见图4,相关公式见式 (1)。

利用长期性能课题中许漯路的数据,3m直尺平均最大间隙R和RSP测试车的国际平整度指数的相关关系见图5。经回归分析,其结果关系式为:

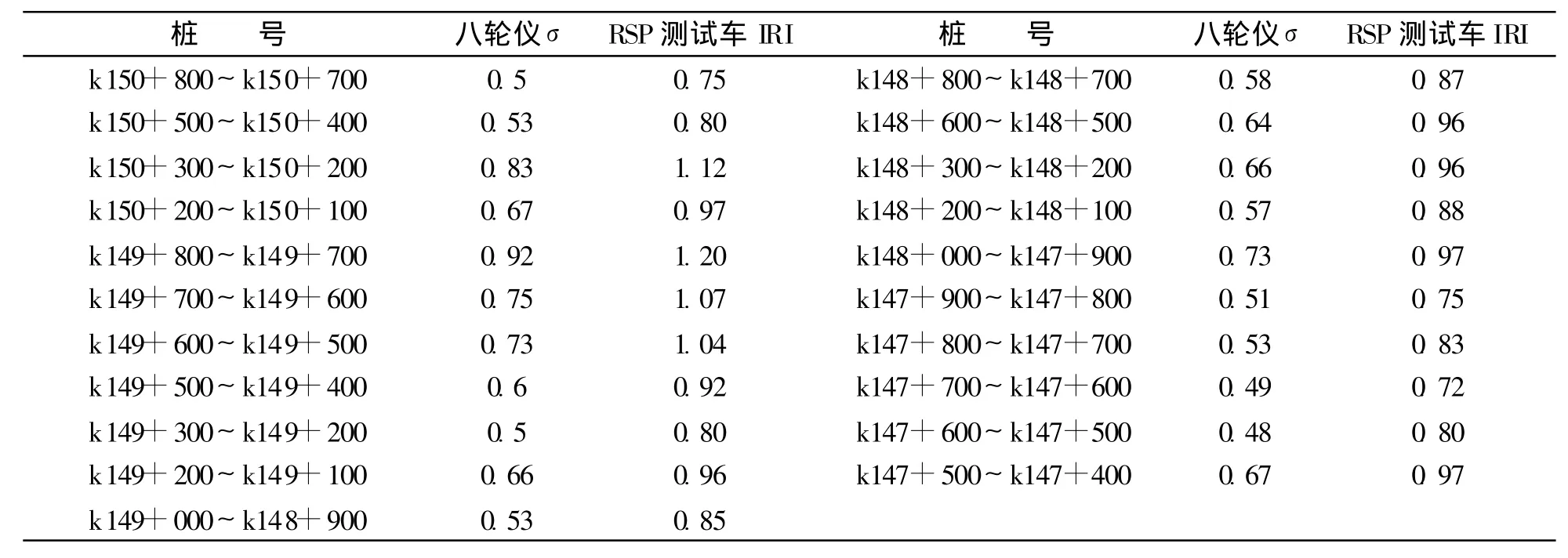
表1 不同方法测定平整度检测值
3.2 推荐结果
通过上述对试验段实测数据的回归分析及平整度指标间的相关关系的建立,建立了IRI、σ和R之间的换算关系。三指标之间的换算关系汇总如表2所示。
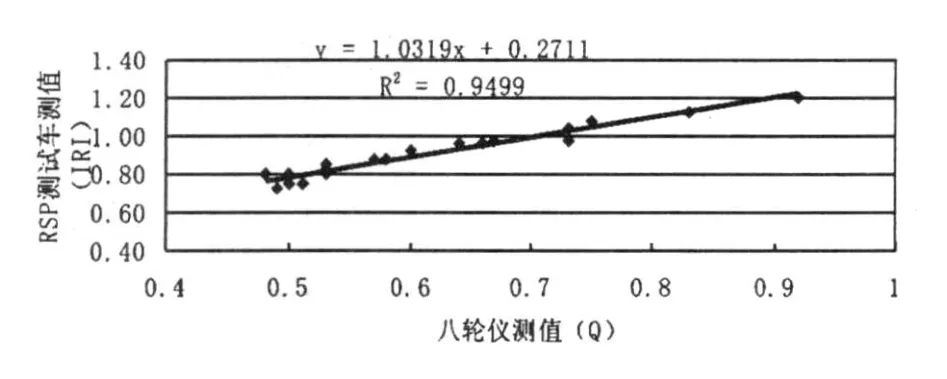
图4 平整度指标间相关关系图
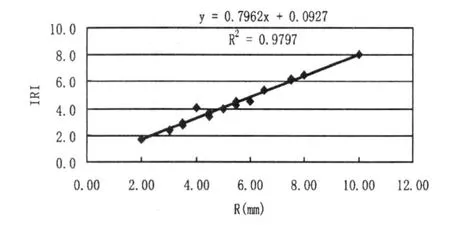
图5 3m直尺平均最大间隙R和RSP测试车测值IRI的对比
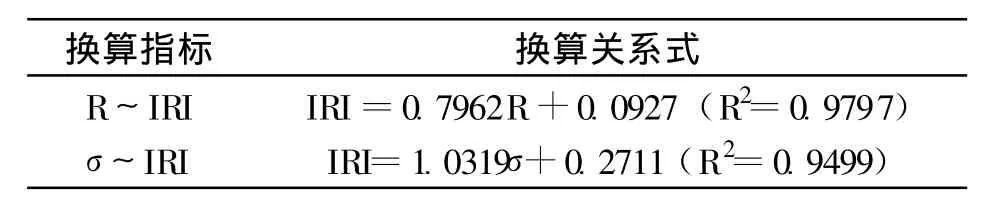
表2 平整度指标之间的换算关系汇总表
根据表中所列的换算关系式,可以得出高速公路、一级公路沥青路面平整度指标IRI≤1.6,与规范规定值IRI≤2相一致。因此,各个平整度指标间具有较好的相关关系,不同测试设备间可以相互比较来评价路面的平整度,而且激光平整度测试车能够更为准确地测试路面平整度。
3.3 激光平整度测试车和八轮仪工作效率对比
通过实际应用,两种测试仪器的工作效率对比如表3所示。
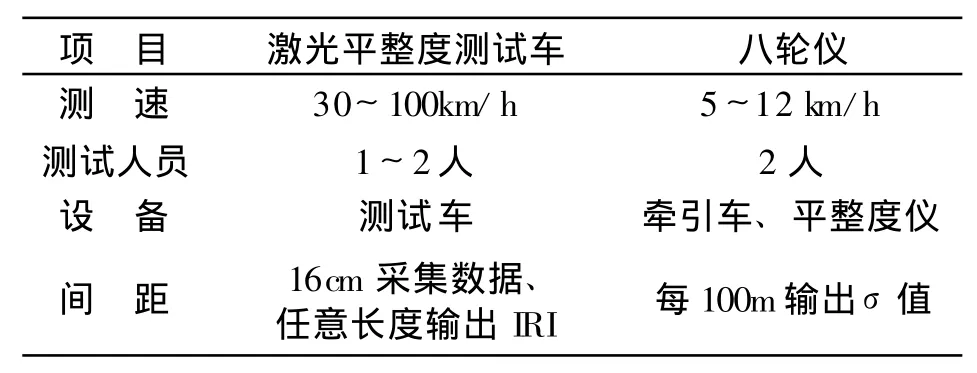
表3 工作效率对比结果
从表中所列的几项工作效率的对比结果可以看出,Dynatest 5051 RSP不仅能够很好地模拟路面实际使用状况,而且能够更为快速、准确地评价路面平整度性能。所以,在我国的路面检测技术中,应发挥这种先进的路面平整度检测设备的优势,不断发展和完善我国的路面管理系统。
4 结 语
通过上述的研究和检测数据的对比分析,得出如下几个结论:
(1)相关关系式根据高等级公路沥青路面对比测试数据回归得到,其他等级公路测试时应进一步修正公式。
(2)平整度测试速度对测试结果具有极大影响。因此,在对比测试中,应根据实际测试条件,保持适宜的恒定测速,且采用相同测速下的数据进行分析;在应用中也尽量采用相同测速测试。
(3)激光平整度测试车使用前的标定对测定值的影响较大,应对距离传感器经常标定,对激光器定期标定,以保证评定结果的准确性。
(4)Dynatest 5051 RSP能很好地模拟实际使用状况,快速、准确地评价平整度性能。
[1]JTG E60-2008,公路路基路面现场测试规程[S].
[2]李强.路基路面检测技术与质量控制[D].西安:长安大学,2002.
[3]曾凡奇.道路无损检测技术[M].郑州:河南人民出版社,2005.
