基于Hu矩的近景摄影测量圆形标志的自动检测
2010-04-19王至博姚喜栾学科
王至博,姚喜,栾学科
(1.青岛市勘察测绘研究院,山东青岛 266000; 2.山东省水利勘测设计院,山东济南 250013)
基于Hu矩的近景摄影测量圆形标志的自动检测
王至博1∗,姚喜2,栾学科1
(1.青岛市勘察测绘研究院,山东青岛 266000; 2.山东省水利勘测设计院,山东济南 250013)
近景摄影测量中的人工标志多采用圆作为主要特征,当目标面与像片平面不平行时,圆形标志的像将为椭圆,本文提出了一种基于形状准则和Hu距的精确类椭圆标志提取方法以及圆形标志的分类方法,并制作编码标志实物在室内实验室进行场景实拍实验,各项实验结果数据证明该理论方法可行。
近景摄影测量;编码标志;边缘检测;Hu矩
1 引 言
近景摄影测量包括低空摄影测量、地面和室内近景摄影测量,是目前国内外研究的热点。在传统的近景摄影测量手段中,如果要获取待测点的三维坐标,需要满足两个条件:一是要求待测点本身纹理丰富,处于适宜的摄影环境中,能够获取合乎质量的立体像对;二是需要在待测物点表面或周围布设一定数量的控制点[1]。在众多测量实践中,待测区域本身往往是缺乏纹理的、隐蔽的、不可通视的或不便于直接测量,表面没有足够的特征,同时在每个待测点周围布设控制点也是件费时费力的工作,这就使得利用常规的近景影摄影测量技术来获得这类待测点的三维坐标变得极为困难,甚至是不可能的。因此,人工标志自动化识别、自动化定位和自动化匹配在近景摄影测量中变得十分必要。
在近景摄影测量的许多应用中,可以在待测物体表面分布一些具有明显特征且易于识别的元素作为标记点,如圆、十字刻划线等。若给标记点加载唯一的身份信息,即对标记点进行编码,对图像中标记点进行唯一身份识别后,可以方便、可靠地实现多幅图像之间标记点的对应匹配。
目前国内外已设计出的编码标志点主要有如图1所示的形式[2~5]:
经观察可知,已有编码标志的图案设计多数采用了圆作为主要特征。这是由于圆形无方向性,特征简洁,是一种简单而完美的图形。因此,如何准确而快速的提取近景像片中的标志圆成为编码标志的识别定位的关键。

图1 国内外已设计出的主要编码标志点
2 标志方案
经分析目前国内外已开发出的编码标志,本文采用Schneider编码方案并对其进行改进,设计了带有起始标记——解码起始圆的方案,简称此标记为编码标志,如图2所示。图形中心为一圆点(称为中心圆),其外面为两个圆环,它们与中心圆成同心圆。靠近中心圆的圆环为白色。在其外面的圆环则采用黑白相间的颜色,并用作标志的编码,称为编码环。图2中的小圆点即为起始标记圆(简称起始圆)。

图2 编码标志
在Schneider编码方案基础上加入起始圆后,使其不再具有“旋转重复性”。中心圆圆心与起始圆圆心的连线为解码的初始位置。编码环平均分为15份,即每24°一份。这样,整个编码环便可以制作成一个二进制码。每一位的前景色和背景色为二进制码的“1”和“0”,如图3(b)所示。若编码按顺时针计,则图3 (b)的编码为111001110011000。

图3 编码的构成
为了以后的匹配工作以及更好的区分编码标志,设计了非编码标志如图4所示。

图4 非编码参考点
3 人工标志检测
3.1 圆形编制区域识别
圆形标志投影后为椭圆形图像,标志的识别就是提取出符合一定要求的椭圆形边缘。经过Canny算子处理后的编码环图像为虚线边缘的标志图像,或者含有非编码标志边缘的图像。通过边缘跟踪可以得到标志图像边缘,但同时也会对虚线边缘进行跟踪,因此需要对跟踪后的边缘和包含在边缘内的像素进行判断,从而实现对圆形标志的识别。
本课题提出以下几个判断准则来提取满足条件的椭圆轮廓:
(1)边缘周长[6]
边缘像素数(周长):近景摄影测量中使用的人工标志尺寸是一致的,由于摄影位置和摄影角度的变化,标志成像大小会发生变化,目标点成像后变为椭圆。为候选标志边缘周长设定范围,如果某候选区域的边缘像素不在此范围内,该边缘被剔除。

式中,P为轮廓周长,Pmin、Pmax分别是起始圆的边缘轮廓周长可能的最小值和中心圆边缘轮廓可能的最大值。从而识别出这两类圆的候选区域。
(2)形状准则[6]
形状因子(圆形度):评价对象物体形状接近圆的程度。形状因子是用来描述平面二维图形几何特征一个参数,其中A为候选区封闭图形的面积,即其中包含的像素数,由前述对灰度图像进行边缘跟踪得到,l为图形轮廓的周长,且0<k≤1,当二维图形为圆时k=1。对圆形标志摄影角度达到70°时k值为0.66左右。椭圆形状随摄影角度变化而变化,如果候选区域的形状因子不符合设定值则该边缘也被剔除掉。
图5(a)是经过上述几何检验标准约束后提取得到的具有完整边缘(即不是虚线)的标志边缘的图像。这些图像有非编码标志,编码标志的中心圆及其起始圆。然而并不是所有图像经过几何检验后都可以得到显示,如图5(b)尚应有编码标志的编码环(因其为虚线)。因此需要更进一步的检验。
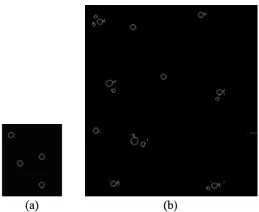
图5 经几何检验识别后的图像截图
(3)基于Hu矩特征准则[7,8]
一般情况下,通过选取适当的周长、圆形度阈值等,可以准确地找到完整的椭圆,实现图像中类椭圆的自动识别。但当摄影角度较大时,图像变形较大,需要进一步结合边缘之间的相似度属性来进行特征区域的自动分割。
Hu[9]于1962年提出Hu不变矩,在形状识别和分类中获得了广泛的应用,但Hu矩针对区域像素进行计算,Chen[10]对其进行了改进,使其可用于形状边缘的检测。
对于形状边缘A={(xi,yi),1≤i≤n},其p,q阶统计矩定义为:

p,q阶中心矩定义为:

对上式中心矩进行归一化处理,得归一化中心矩:

由归一化中心矩可得7个用于边缘形状检测的不变矩:

上述7个不变矩具有平移、旋转和尺度变化的不变性。
设另一条形状边缘B={(xi,yi),1≤j≤m},根据边缘形状的不变矩,计算两个边缘的形状相似度:

其中:

当两条边缘形状完全相同时,I(A,B)=0,否则,边缘的相似性越差,I(A,B)的值就越大。取边缘相似性系数:

其中Tj为边缘相似度阈值。
根据以上定义的常用矩,对二值影像进行区域分割,获得区域边界,每个区域对应一个目标,计算其7个Hu不变矩和扩展的两个4阶不变矩,区分出圆形标志边缘特征。
矩不变量尽管理论上是不受平移、旋转、尺度变化的,但是实际中由于变换后数字化的误差,存在一些偏差。而关键是要提取出目标对象的对应不变的区域和边界。因此采用不变矩作为特征不变量的分类效果最终还是受到图像分割结果的影响。
3.2 圆形标志分类判断
在上一步识别出的圆共有三类,一类是非编码标志圆,一类是编码标志中的中心圆,一类是编码标志中的起始圆。需要将这三类圆分类识别,并予以编号存储。
(1)非编码标志圆与编码标志中心圆的分类判断
两类标志的区别在于它们除了中央圆点之外的部分。非编码标志的组成只有一个中央圆点,而编码标志的组成除了中央圆点外还有若干个与之同心的圆环段。虽然编码标志的图像是由几个互相独立白色区域组成的,但同一编码标志中的圆环段与相应的中央圆点的距离是最近的。即使不同标志间的粘贴位置十分相近,标志间的距离也总是大于同一编码标志内部的距离,况且实际操作中为了充分发挥标志的作用,要求其粘贴位置保持一定距离。
改变数据结构,采用局部搜索算法。利用标记点的距离特性,采用图像分割的方法将对隶属环段的搜索限定在一个小的图像子块内。由于在一个编码标志成像的范围内不可能出现任何其他标志,于是可以以中心圆圆心为中心分割出一个矩形图像块,矩形的大小满足只包含同一编码标志所有的组成部分。图像拍摄时相机与被测物体间的距离要求保证了各标志的成像大小基本恒定,所以矩形大小可以采用多次试验的方法确定一个固定值。矩形图像块分割完毕,统计每个块内的白色区域的数目。如果块内只有一个白色区域,那么这一定是非编码标志,否则,是编码标志。
(2)编码标志中心圆与起始圆的分类识别
在上一步识别出非编码标志圆后,剩下的就是编码标志中心圆与起始圆了。这两类圆最大的差异就是面积一个大,一个小。利用这个特点,很容易能将两者区分开来。
3.3 精确中心定位
由于本课题所设计的两类测量标志采用圆形图案,在实际应用中多呈椭圆形,则测量标志的定位实质上是指椭圆在数字图像上的定位。经过边缘检测,可以得到椭圆标志的边缘,然后需要对边缘点进行计算。
Canny边缘检测确定了候选椭圆的单像素精度的边缘,在边缘内运用区域生长法算法可获得边缘所包围的区域内各像素的灰度Iij,利用下式可以计算标记点的质心坐标,即得到标记点的亚像素中心。

4 实验及结果分析
本文提出的算法已采用Matlab实现。实验数据在山东科技大学3D数字摄影测量实验室中采集。像片采用Canon公司的EOS-5D型单反数码相机(分辨率4 368×2 912,焦距24 mm)。轨道实拍实验中,标志总数为18个,其中编码标志点12个。拍摄高度为8 m,拍摄共150幅像片,设计对于编码标志,编码环直径为4.5 cm,中心圆直径1.5 cm,起始圆直径4.5 mm。
首先采用标准编码图像合成的模拟场景图像进行实验,效果如图6所示。

图6 模拟实验图像

图7 圆形区域判断
经过上述3.2节中圆形标志分类判断方法以及canny算子中心定位算法后,对其精确中心定位以及中心圆和起始圆的判断结果如图7所示(利用Matlab程序分别在识别出的中心圆和起始圆下方3个像素处用数字1和3标识,并在定位中心以十字丝标注)。
采用场景实拍效果如图8所示。

图8 场景实拍像片
选取该像片中拍摄到的标志数目为8个,采用本设计识别定位算法,识别定位结果如下:
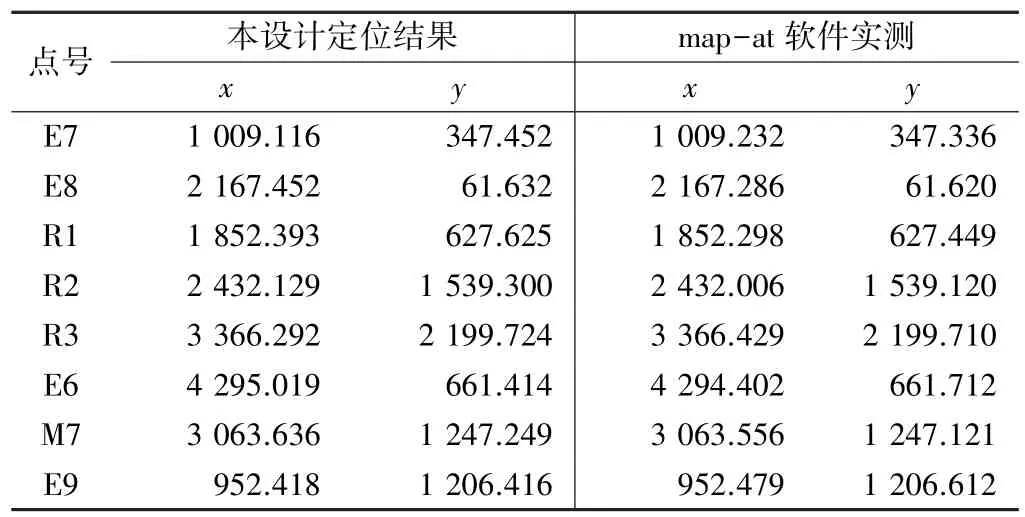
像片识别定位结果(单位/像素) 表1

三类圆识别结果 表2
表1中的点号为粘贴时的标注,其编码为解码后的二进制转化为十进制后的结果(后续工作),具体编码方案见上述标志方案。由于标志中有两个圆,起着至关重要的作用,中心圆用来中心定位,且由中心圆和起始圆的质心连线方向为标志解码识别的起始方向,因此要求识别定位的精度较高。本设计经过多组实验,共拍摄0°~70°,拍摄距离1.5 m~3 m的共150幅像片。根据识别结果以及定位结果,标志的3类圆的识别判断准确率为98.75%,且定位结果也较好,可以满足实际工程需要。
5 结 论
针对缺乏纹理特征的待测区域,采用布设编码标志的方案,针对标志中的圆形特征提取,本文提出了一种基于形状准则和Hu矩的识别方法,各项实验数据表明,识别结果较好。
[1]吴庆双.基于空间后方交会的三维坐标测量方法研究[D].武汉:武汉大学,2005
[2]SCHNEIDERC T.DPA-WIN-A PC based digital photogrammetric station for fast and flexible on-site measurement [J]International Achieves of Photogrammetry and Remote Sensing,Vienna,1996.XXXI(B):530~533
[3]HEUVELY D,KROONR F A.Digital close-range photogrammetry using artifical tragets[J]Int Archives of Photogrammetry and Remote Sensing,Washingtion D C,1992.29 (B5):222~229
[4]AHNS J,RAUHW.Circular coded target for automation of optical 3D-measurement and camera calibration[J].International Journal of Pattern Recognition and Artificial Intelligence,2001,15(6):905~919
[5]黄桂平.圆形标志中心子像素定位方法研究与实现[J].武汉大学学报.信息科学版,2005,30(5):388~391
[6]周玲,张丽艳,郑建冬等.近景摄影测量中标记点的自动检测[J].2007,25(3),288~294
[7]张天序.成像自动目标识别[M].武汉:湖北科学技术出版社,2005
[8]季铮.近景目标三维重建的自动化方法研究[D].武汉:武汉大学,2007
[9]Hu.M.Visual pattern recognition by moment invariants[J].IRE Trans-action on Information Theory,1962,8(2):179~187
[10]Chen C.Improved moment invariants for shape discrimination[J].Pattern,Recognition,1993,26(5):683~686
Automated Circle Target Detection in Close-Range Photogrammetry Based on Hu Moments
Wang ZhiBo1,Yao Xi2,Luan XueKe1
(1.Qingdao Geotechnical Investigation and Survey Institute,Qingdao 266000,China;2.Shandong research institute of investigation and design of water conservancy,Jinan 250013,China)
Most artificial targets in close-range photogrammetry use circle target as their essential feature,but when the targets are not parallel to the photo,the targets will be ellipse in photo.This paper proposed a new method based on geometric checking and Hu to extract circle area,and how to classify different circle areas.What’s more,the process in real scene image experiments is developed and tested,and these result data prove this research can fulfill practical projects.
close-range photogrammetry;coded target;edge detect;Hu moments
1672-8262(2010)05-93-05
P234.1
A
2009—12—25
王至博(1977—),男,工程师,主要从事工程测量方面的研究。
