智能控制系统设计方法的比较研究
2010-04-11毛钢元刘志国
毛钢元,刘志国
(1.淮阴工学院电子与电气工程学院,江苏 淮安223003;2.淮安市第三人民医院,江苏淮安223001)
0 引言
自动控制理论是与人类社会发展密切相关的一门学科。自从19世纪J.C.Maxwell对具有调速器的蒸汽发动机系统进行线性常微分方程描述及稳定性分析以来,经过20世纪初Bode、Nichols和Nyquist等人的杰出贡献,才形成经典反馈控制理论,这一控制理论的研究是建立在传递函数模型的基础之上的。随着电子计算机的出现和迅速发展,计算和信息处理数据能力的不断提高,促使了控制理论向着更加复杂、更加严密的方向发展,20世纪60年代出现了以状态空间分析为基础的现代控制理论。它主要运用时域的状态空间方法,包括线性系统理论、最优控制、系统辨识和随机控制理论等几个主要分支。但在实际运用中,由于自然界的许多被控对象难以用精确的数学模型来描述,而且往往系统是时变的、非线性的、随机的,所以经典控制理论与现代控制理论的一些分析和设计方法很难满足现实需要。80年代,随着计算机技术的高速发展以及人工智能研究领域的不断拓展,人工智能与控制理论的结合已经成为了一门边缘的交叉学科,这就是智能控制。目前智能控制的研究主要包括两方面的基本内容:一是智能系统的原理分析,二是智能控制系统设计。智能控制是针对系统的复杂性、非线性、不确定性而提出来的。它的设计原理更多地依赖于人的先验知识,更多地是对人类思维和经验知识的模拟。所以它就有可能较少地或者不依赖于精确的数学模型。目前智能控制设计的途径主要有以下四个方面:基于专家系统的专家智能控制、基于模糊推理和计算的模糊控制器、基于人工神经网络的神经网络控制器、以及基于信息论和遗传算法的集成型智能控制器。
由于上述控制理论的发展,使得在控制系统设计时有了更多的选择余地。我们能够根据不同的被控对象、不同的技术要求、不同控制系统等等因素来选择各自的数学模型、各自的模型结构和参数的辨识方法以及选择各自的控制器,从而进行相应的控制器参数优化。本文中所提及的控制系统的设计是基于人工智能方法的设计,是一个在控制系统设计方面具有丰富经验的专家系统。
1 控制系统智能设计的必要性和可能性
1.1 控制系统智能设计的必要性
最近几十年,随着计算机的发展,控制理论也不断走向完善,从而产生了许多先进的控制理论和设计方法。但是在实际运用过程中,我们的工程技术人员往往仍然按照传统的思维方式和过去陈旧的控制理论去设计系统,以至于这些先进的控制理论和先进的设计方法无法或者根本就不能在实践中获得应用,造成了理论与实践的严重脱节。
造成这种理论与实践脱节的原因主要在于以下几个方面:首先,控制理论是一门对学习者和应用者的数学功底要求很高的学科,特别是对设计人员,要求他们具有使用较深的数学工具的能力。然而这一点对于从事控制系统设计的绝大多数工程师来说一般很难做到;其次,作为控制系统设计必备的控制系统计算机辅助设计软件的开发,目前很难做到软件与工程设计人员的有机结合,因为这些开发软件包的软件工程师一般不具有控制系统设计所需要的丰富经验和知识;再次,在CAD软件包中收入的控制系统设计方法越是先进新颖就越是脱离一线的工程技术人员的实际水平;最后,我们从事控制系统设计的工程师还不具备高级专家所应该具有的丰富的控制系统设计的知识和经验。
正是基于以上的原因,我们考虑能否设计出一套智能化程度高的专门针对控制系统设计的应用软件来解决上述问题,因此,控制系统的智能设计这一研究课题就摆在了当今从事这一方面研究的科学家的面前。
1.2 控制系统智能设计的可能性
尽管目前控制系统的智能设计还存在很多的困难,但是控制系统的设计走向智能化是不可逆转的“时代”潮流。特别是最近几十年来人工智能技术的发展,尤其是专家系统的广泛应用和这一理论逐渐趋于完善、走向成熟,给了控制系统的智能设计一个难得的契机。首先,要实现控制系统的智能设计实质上是要制作一个高级的专家系统,一个集丰富的设计知识和经验于一身的高级的人工智能“专家”。而对于这一点人工智能技术已经为控制系统的智能设计搭好了一个起步的平台;其次,目前控制理论的方法虽然日新月异,但是它依然是一个完整的体系,这就为我们所要建立的高级专家系统提供了可靠的知识来源;最后,我们所要建立的这个专家系统实质上是一套计算机程序,而最近几年来国内外在这一领域所做的软件开发(诸如CADCSC等软件)为控制系统的智能设计积累了宝贵的经验。
2 人工智能与专家系统
人工智能作为一门广泛的交叉和前沿科学在近几十年里获得了长足的发展,它越来越受到各国科学家的普遍关注。特别是计算机的发展,进一步地为人工智能这门科学的发展提供了硬件和软件的支持,使得人工智能技术更容易运用于实践。尽管人工智能目前还面临不少争论和困难,但是这些困难和争议终将会被解决,人工智能也必将会有一个更加广阔的发展前景。目前人工智能的研究领域主要在以下几个方面:问题求解、逻辑推理与定理证明、自动程序设计、专家系统、机器学习、人工神经网络、模式识别、智能控制、机器视觉、以及机器人学等。
专家系统是人工智能应用研究最活跃的领域之一,它已经获得了日益广泛的应用。一般来说,专家系统是一个智能计算机程序系统,其内部具有大量专家水平的某个领域知识与经验,能够利用人类专家的知识与经验和解决问题的方法来解决该领域的问题。也就是说,专家系统是一个具有大量专门知识和经验的程序系统,它应用人工智能技术,根据某个领域一个或多个人类专家提供的知识和经验进行推理和判断,模拟人类专家的决策过程,以解决那些需要专家决定的复杂问题。
专家系统的主要功能取决于大量知识。设计专家系统的关键是知识表达和知识的运用。专家系统与传统的计算机程序最本质的区别在于:专家系统所要解决的问题一般没有算法解,并且往往要在不完全、不精确或不确定的信息基础上作出结论。
一般专家系统由知识库、数据库、推理机、解释器及知识获取五个部分组成。其中知识库用于存取和管理所获取的专家知识和经验,供推理机使用,具有知识存储、检查、编辑、增删、修改和扩充等功能;数据库主要用于存放系统推理过程中所需要的控制信息、中间假设和中间结果;推理机则是利用知识进行推理、求解专门问题;而解释器的功能在于向用户解释系统的行为;知识获取器则是专家系统与专家的“界面”。
我们目前所研究的控制系统的智能设计正是基于这样的一个专家系统,它就是许多在这一领域里富有经验的人类专家知识的总和。
3 控制系统的智能设计方法
为了实现控制系统的智能设计,首先要将已有的控制系统常规设计方法智能化,并将设计知识系统化。已有的控制系统的设计方法通常表现为一系列抽象的数学关系。但设计者在使用某一特定的设计方法时,却需要加以调整,使之融合被控制对象的领域知识,并充分发挥该方法的技巧。另外,许多细致而分散的设计知识也需要系统化,并集成到设计软件的知识库中去。总之,必须将已经有的设计方法改造成为智能化的设计方法。
目前,提出了三种新的智能设计方法,并同时开发了两种与之相应的智能设计软件IntelDes1.0和IntelDes3.0。这些智能设计方法是抽象响应特征设计方法,鲁棒的逆Nyquist阵列设计方法,正规矩阵参数优化设计方法。其中后两种都是适用于多变量鲁棒控制系统的设计方法。前一种方法虽然主要用于单变量系统,但在多变量系统设计流程的某些环节上也能发挥很好的作用。这些方法已经能够初步地满足广大设计工程师的实际需要。以上的三种控制系统智能设计方法是远远不够的,还需要更多、更好、更先进的设计方法来不断完善、不断修正、不断地扩充并集成到这个大的专家知识库中去。特别是在非线性系统、时变系统、自适应系统、变结构系统等类型的控制系统的智能设计方面还存在许多困难,要形成一套完整有效的智能设计方法还有很长的一段路要走。
以上我们已经谈及控制系统的智能设计,首先是要选择辨识系统数学模型的方法辨识出系统的模型,然后选择辨识模型参数的方法辨识出模型的参数,接着是要找出一个合适的控制器来,最后还要对控制器的参数进行优化处理,以达到实际的控制要求。由于目前的控制系统的智能设计都是基于对已知系统的数学模型而做设计的,所以对于前面提到的选择辨识模型的方法、选择辨识模型参数的方法,智能设计还没有能够形成一个行之有效的方法,还有待于这一领域的专家和学者不断地总结、不断地集成他们的专家知识到这个智能设计的高级专家的知识库中去。正是由于这个原因,以下所谈到的一些智能设计方法都只能是在给定控制对象的数学模型的前提下进行的。
3.1 抽取对象响应特征的设计方法
抽取对象响应特征的设计方法的主要思想是:不直接对被控制对象的数学模型设计控制器,而是从对象的阶跃响应中提取代表其动态性质的特征量来作为设计的依据,在专家知识和经验的指导下设计控制器。具体地说,是对一类常见的“普通对象”的模型作闭环仿真,获取其阶跃响应,并抽取响应的时间域的主要特征,然后根据这一响应特征由计算机自动完成控制器的设计。此方法将“普通对象”闭环,由小到大地调整其开环增益,使对象闭环的阶跃响应产生较大的超调(超调量σ达到0.3~0.6)。这时的对象闭环阶跃响应近似一个二阶系统的衰减震荡过程。抽取此衰减震荡的周期,计算其衰减震荡的角频率ωc=2π/Td,据此估算其产生等幅震荡时的临界震荡角频率ωp。再根据系统控制要求的阶跃过程时间估算系统的期望截止角频率ωc,进而为系统设计智能超前校正器,并根据要求的系统的静态精度设计智能滞后校正器。
以下是抽取对象响应特征方法的智能设计流程:
①输入对象的传递函数G(s),要求的过渡时间ts,要求的静态误差ess和动态品质,取要求的ωc=7/ts,构造一个如下图的对象闭环,初选Kp=1;

图1 闭环阶跃响应
②运用设计软件进行自动的可视化仿真,得到对象闭环阶跃响应,读取其超调量 σ,过渡过程时间Ts和衰减震荡时间Td的值,根据σ的值分为三种情况:
a)σ <0.3(无超调或弱震荡):如果响应的峰值与静态值之比 ymax/y∞< 0.9,Kp1=4Kp,wp=3/Tc;如果 wp≥ wc,则 kp=wc/wp,如果 ωp< ωc,则 Kp2=1.5Kp,Kp 为比例系数;
b)0.3 < σ ≤0.8(强震荡):读取Td值,计算ωd=2π/Td;根据表1 求出 β;ωp= ωd/β;
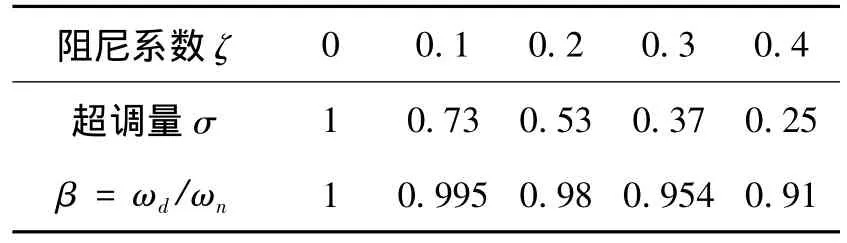
表1 二阶对象的衰减震荡角频率wd与超调量σ的关系
如果ωc/ωp>6,则提示不可能设计出满足指标的校正器,建议设计人员适当增大ts,转①重新设计, 否 则, 如 果 ωc/ωp< 1, 则 Kp3=Kpmax(ωc/ωp,0.4);
c)σ>0.8(不稳定或接近不稳定):则Kp4=0.1Kp;
③仿真,获得动态指标,如果动态品质满意,则转④,否则,保留第一级超前校正,转②设计第二级超前校正,但若两级超前校正环节仍然不能满足动态品质的要求,则给出提示;
④仿真,检查静态指标;如果静态指标不满意则加入 K1(s)ω1=(0.1 ~ 0.2)ωc;否则保留第一级校正器,转③设计第二级滞后校正器,但如果两级滞后校正器仍然不能满足静态品质的要求则给出提示。
上述流程已经被编制成智能设计软件,它不仅适用于许多单变量系统的设计,而且也适用于某些多变量系统的设计方法中的一些设计步骤,这就是智能设计软件IntelDes1.0和IntelDes3.0。使用该软件时,用户只需要输入以框图描述的被控制对象模型的性能指标,即过渡过程时间、超调量、以及静态精度,并指明输入量及与之对应的输出量,智能设计软件就可以在知识库中储存的高级专家知识的指导下自动地与用户进行互动式设计。
3.2 鲁棒的逆Nyquist阵列(RINA)设计法
多变量控制系统的Nyquist阵列是多变量系统频率域控制理论的重要内容之一。其主要思想是:使系统的开环传递函数矩阵成为对角优势矩阵,因而仅用矩阵的对角元素便可以判断系统的稳定性。利用此性质,可以为多变量系统的每个通道分别设计对角的动态补偿器,从而使更多的变量系统的设计大为简化,所得到的控制器也较为简单。但是当系统受到摄动时,原来的对角优势矩阵是否仍然能保持对角优势呢?系统稳定性条件是否会有变化?当摄动强度给定时,矩阵的对角优势应该达到何种程度才能保证系统的稳定性呢?于是就提出了对原有RINA设计方法改进的问题。这就是鲁棒逆Nyquist阵列(RINA)设计法,它是在给定摄动强度下能保证控制系统鲁棒稳定性的方法。
鲁棒逆Nyquist阵列(RINA)设计法的基本思想是:因为系统的鲁棒稳定性是与传递函数的特征值对摄动的敏感性有关的,而正规矩阵的特征值对扰动最不敏感。为了使系统获得良好的鲁棒性,就应该加强对对角优势度的要求,从而保证系统具有足够的对角优势度。基于这一思想,鲁棒逆Nyquist阵列(RINA)设计法还强调必须按照扰动的强度将被控制对象补偿到具备足够的对角优势度,以保证系统的鲁棒性。
以下是鲁棒逆Nyquist阵列(RINA)设计法的智能设计流程:
③针对对角优势度低于0.5各行和各角频率段采用适当预补偿方法改进,转②处继续执行;
⑥仿真检验,设计结束。
4 仿真与性能比较分析
本系统在经过仿真运行后,系统工作稳定,操作方便,能够获得满意的性能指标。图3是在单位阶跃信号下的传统PID控制与智能软件设计方法下的响应曲线。很显然,智能设计软件设计方法控制方式获得的响应曲线具有较好的跟随性,且稳态精度高,超调量明显较小,调节时间得到了明显改善,从而全面地改善了系统的动态性能。
图2 单位阶跃信号下的传统PID控制
图3 智能软件设计方法下的响应曲线
5 结论
控制系统的智能设计是一门新兴的学科。尽管控制理论发展到今天已经相当的成熟,创造了许多经典的控制系统的设计方法,但是控制系统的设计完全走向智能化还有很长的路要走。例如在控制系统的智能设计中,对系统模型的智能设计,对模型参数辨识方法的智能选择以及对于时变系统、非线性系统、随机系统等方面的研究还有待于进一步深入,还不能形成一套完整的体系。这一体系的形成需要更多的从事这一领域研究的科学工作者不断地总结控制系统设计的经验,使它们成为一整套系统化的知识,创建更为强大的设计知识库,从而构建一个巨大的高级专家系统,成为真正地能够从选择系统模型开始到控制器优化结束的整个过程的智能化设计。除此之外,控制系统的智能设计还要能够具有自学习的功能,能够对专家知识库进行维护,随着控制理论的发展而不断更新知识库中的内容。我们完全能够想见,在未来控制系统的智能设计必定会在控制系统设计的实践中占有重要的地位,成为控制系统设计的一个必备的辅助设计专家,成为控制工程师们的良师益友。
[1]Juanjuan Wang,Chuang Fu,Yao Zhang.SVC Control System Based on Instantaneous Reactive Power Theory and Fuzzy PID[J].IEEE Transactions on Industrial Electronics,2008,55(4):1658 – 1665.
[2]Rong-Jong Wai,Meng - An Kuo,Jeng - Dao Lee.Design of Cascade Adaptive Fuzzy Sliding-Mode Control for Nonlinear Two-Axis Inverted-Pendulum Servomechanism [J].IEEE Transactions on Fuzzy Systems,2008,16(5):1232-1244.
[3]Han - Xiong Li,Shaocheng Tong.A hybrid adaptive fuzzy control for a class of nonlinear MIMOsystems[J].IEEE Transactions on Fuzzy Systems,2003,11(1):24 -34.
[4]Acampora G,Loia V.Fuzzy control interoperability and scalability for adaptive domotic framework [J].IEEE Transactions on Industrial Informatics,2005,11(1):97-111.
[5]张铭钧.智能控制技术[M].哈尔滨:哈尔滨工程大学出版社,2008.
[6]王耀南.智能控制理论及应用[M].北京:机械工业出版社,2008.
[7]师黎,陈铁军,李晓媛,等.智能控制实验与综合设计指导[M].北京:清华大学出版社,2008.
[8]韩力群,王志新,叶斌.智能控制理论及应用[M].北京:机械工业出版社,2008.