线阵CCD用于汽车制动性能检测的研究
2010-04-11周加超
周加超
ZHOU Jia-chao
(盐城师范学院 物理科学与电子技术学院,盐城 224002)
线阵CCD用于汽车制动性能检测的研究
Study of using linear CCD to detection the vehicle braking system
周加超
ZHOU Jia-chao
(盐城师范学院 物理科学与电子技术学院,盐城 224002)
介绍一种运用光电耦合技术检测汽车制动性能的系统。安装在车体中部光学扫描成像系统将路面前后相隔微小距离的影像分别投射到线阵CCD以中心为界的两部分线阵上,在汽车行驶中,同一路面则在CCD的左右两边线阵上先后成像。此像素经A/D转换送到CPLD进行处理,通过比较、检索两者中的特征点(前者记录特征点,后者比较、检索),根据制动所经历时间和像元的偏移数即可计算出汽车运动速度和侧偏距离,进而得出该汽车制动性能。
线阵CCD;汽车制动性能;光学扫描
0 引言
检测汽车制动性能的方法主要有台试法和路试法。台试法机动性差,且有测试值与实际值相差较大的现象;路试法目前主要仪器为五轮仪及惯性式减速度计。近代的第五车轮采用电磁感应传感器与数字显示装置,能精确测出起始车速、制动距离、制动时间,但价格昂贵、操作复杂,目前多用于专业汽车制造厂。
CCD传感器具备光谱响应宽、动态范围大、灵敏度和几何精度高、噪声低、体小质轻、低功耗、抗冲击、耐震动、抗电磁干扰能力强、坚固耐用、寿命长、图像畸变小、无残像、便于进行数字化处理和与计算机连接、可高速成像以满足对高速运动物体的拍摄等优点,在图像采集、非接触测量和实时监控方面得到了广泛应用[1]。本文以高速线阵CCD作为传感器,研究汽车制动性能检测系统。
1 汽车制动性能检测系统设计原理
1.1 汽车制动性能检测系统组成框图
系统框图如图1所示。汽车制动性能检测要求:汽车在规定初速度下刹车,其制动距离和制动稳定性应符合相应国标要求[2]。因此系统由车速检测、制动力检测和MCU综合处理三个模块组成。其中车速检测为系统核心。
1.2 车速检测原理
车速测算原理如图2所示。CCD的线阵方向与
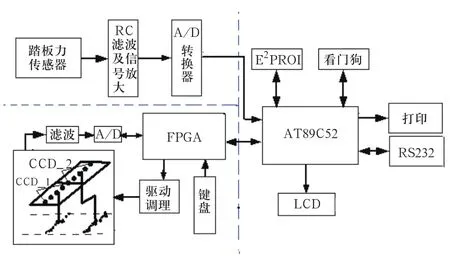
图1 系统组成框图
汽车前向垂直固定安装。检测时,线阵CCD始终向A/D转换器输出被扫描对象表面视频图像信号。A/D转换器采集转换CCD_1的8线中点数据(线数多少可根据实际测量情况增减),随后在CCD_2输出的视频信号中依次比较查找,一旦找到相符的特征点,说明汽车已移位了已知距离,检索成功。根据检索时间和偏移的象元数可计算出车速和侧偏角。
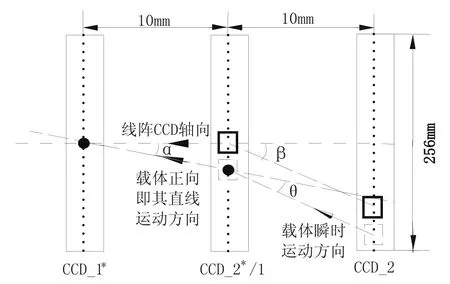
图2 汽车运动速度计算原理
实际操作中,CCD的线阵方向与汽车前向垂直固定安装不易做到,通常有一误差角α(如图2所示)。其检测方法为:让汽车沿直线运动,重复上述的检测,此时的侧偏角即为误差角α。误差角α和速度v’的计算公式为:
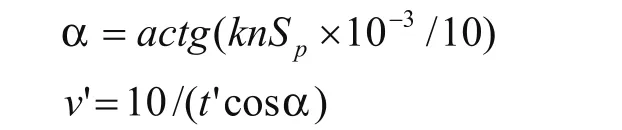
式中:k为光学系统线阵方向的放大倍率,本设计取100;n为在CCD_2上检测到的特征点偏移象元数,Sp为像素间距,t为检索时间。
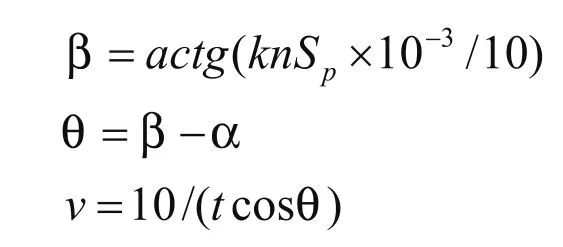
这样,在随后有侧偏的测量中,汽车的前进速度v为:
1.3 汽车制动性能主要参数计算
在汽车测试过程中,每完成一次像素检索计数器hj加1,同时侧偏距离累加器计入这次检索的侧偏像素数nk。则制动距离Szd和侧偏距离Scp分别为:
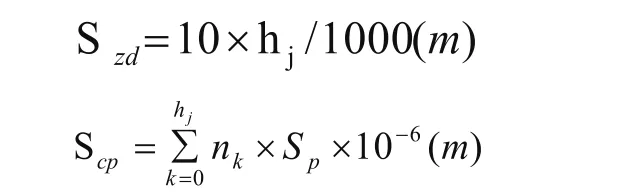
充分发出的平均减速度MFDD可通过下列公式计算:

式中:vo为试验车制动初速度;vb为0.8vo试验车速;ve为0.1vo试验车速;Sb为试验车速从vo到vb的行驶距离;Se为试验车速从vo到ve的行驶距离。
2 系统硬件设计
2.1 IT-P1-1024 CCD简介
IT-P1-1024为1024元4口输出CCD,其像元尺寸为10μm × 10μm,其驱动频率为25MHz,线扫描速率达87kHz[3]。
4个口像元的具体分布如图3所示。可以看出:CCD分别从OS1、OS2、OS3、OS4 4个输出口输出光敏信号,像元按奇偶分成两行错位排列,形成100占空比。4口输出方式的输出速度相当于在相同驱动时钟驱动下输出速度的4倍(相对于单口双行体制)。这样就可以用较低的频率完成高频才能完成的功能,避免高频对电路的苛刻要求和节省购买高频器件的经费。
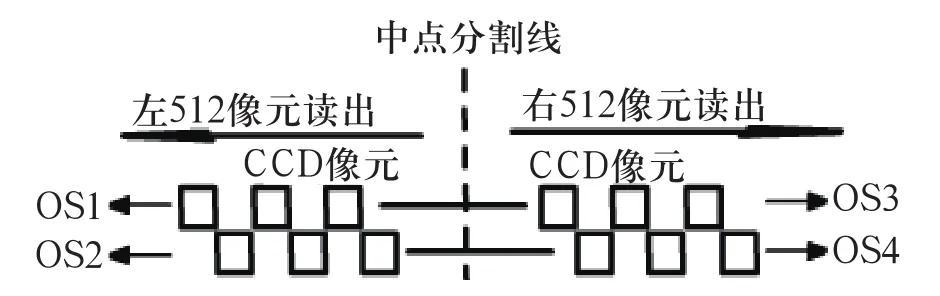
图3 CCD像元分布示意图
2.2 光学扫描成像系统
光学扫描成像系统由线阵CCD、镜头组件组成。镜头组件中的折射组件可将相同大小、前后垂直相隔10cm的P1、P2区域的影像折射移位后平行拼接,经椭球面透镜分别投影到线阵CCD_1和CCD_2上。这样,被CCD_1扫描的地面就可能被CCD_2再次扫描,即成像两次。为防止互相窜光,需在两条光路中间加以遮罩隔离。
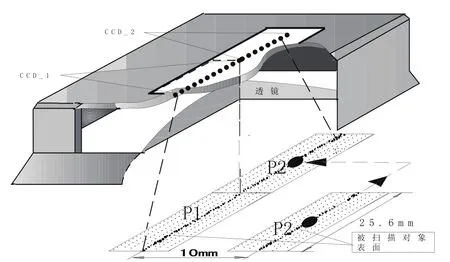
图4 光学系统结构图
2.3 主要元器件选用和工作速度的匹配
设可测车速上限为250km/h(69.4m/s),光学系统纵向分辨值为5mm,则地面花纹信号频率为13.88kHz。根据采样频率大于等于两倍信号频率的采样定理,线阵CCD线扫描速率应为28kHz,若选用4×256个象元,其工作频率应大于7.2MHz。在实际中,为了保证被测信号的质量,采样频率是被测信号最高频率的3~4倍,在工程上有时取到10倍[4],本文选用上述4端口输出IT-P1-1024 CCD,完全满足该技术要求。
为留有余量,通常A/D转换器的选取标量频率为实际工作频率的两倍,本设计采用4片美国国家半导体公司生产的8位50MSPS高速A/D转换器ADC1175-50ILQ,分别转换来自IT-P1的四路视频输出信号。
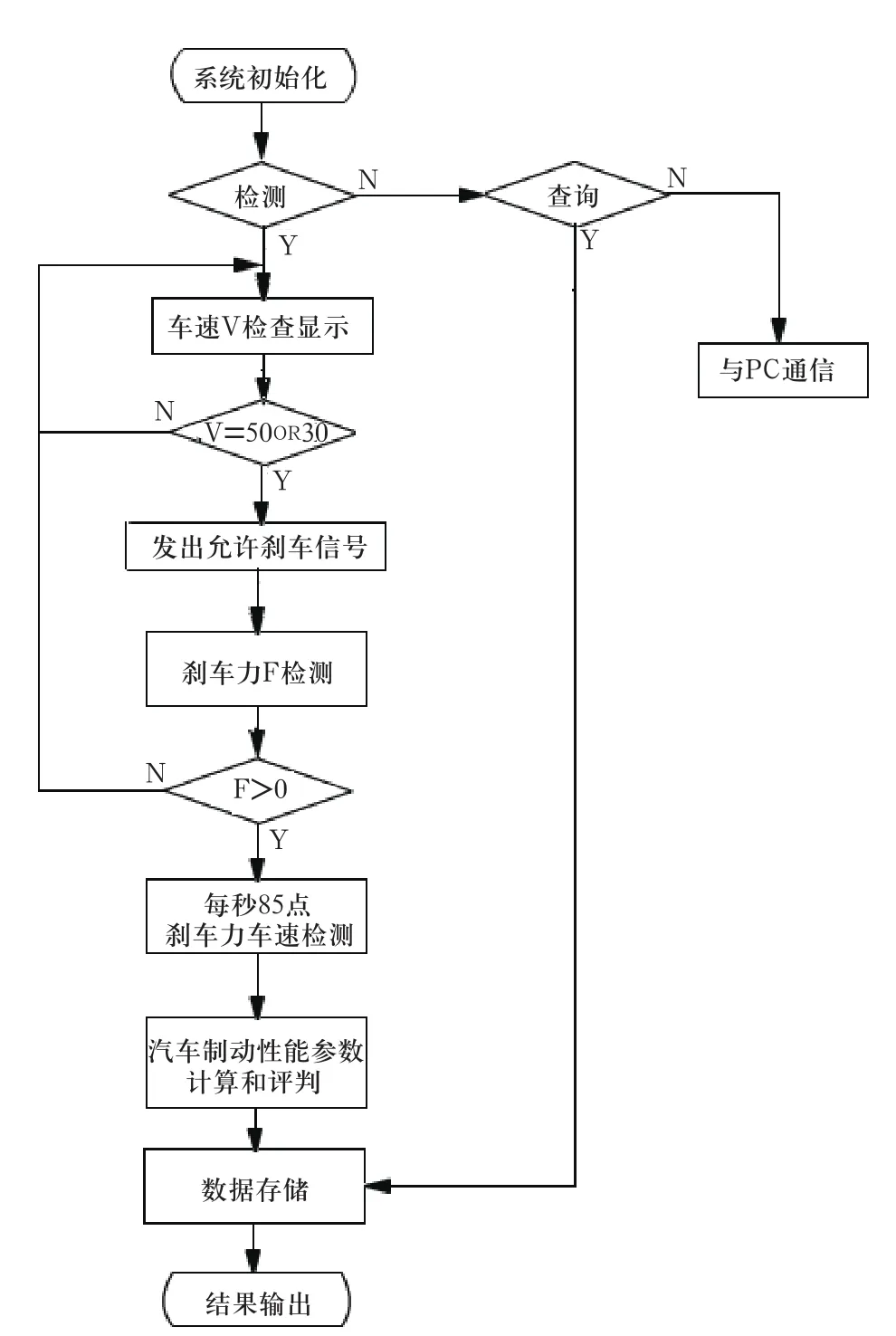
图5 汽车制动性能检测系统软件流程图
由于IT-P1的驱动工作频率要求很高、相位关系复杂,宜用高速CPLD作为CCD的基本时序发生器。本设计使用Lattic公司的ispMACH4000C/B/V系列芯片,该芯片的工作时钟可以达到400MHz,完全可以满足此CCD的工作时序要求。
3 系统软件设计
本系统中,软件分为两部分,分别存储于89C52和EP2C35芯片中,存储于89C52中的为汽车制动性能参数计算和评判、刹车力检测、系统调控、通信和显示等程序;存储于EP2C35中的为CCD时序信号产生、每秒钟85点(CCD每扫描1024帧建立一检测点)车速检测和按键去抖动等程序。
系统软件分别采用C51和VHDL语言来编写完成,程序主流程如图5所示。
4 结束语
本系统可单独作为一个检测仪器使用,也可方便地与单片机、DSP、微机等连接,构建复杂检测控制系统。通过以上介绍也不难看出,线阵CCD用于快速动态测量是一个比较复杂的技术,需要综合应用光、机、电、算等各种技术。
[1] 王庆有.CCD应用技术[M].天津:天津大学出版社,2000.
[2] GB7258-1997.汽车制动性能测试国家标准.机动车运行安全技术条件[S].
[3] IT-P1-xxxx-B Image Sensors Data Sheet[Z].DALSA Semi conductor.2005.
[4] 李长贵,刘敬海等.线阵CCD用于实时动态测量技术研究[J].光学技术,1999(2):5-8.
TP212.14
A
1009-0134(2010)11(下)-0027-03
10.3969/j.issn.1009-0134.2010.11(下).10
2010-08-17
江苏省自然科学基金(BK2008199); 江苏省高校自然科学基金资助项目(08KJD140005)
周加超(1970 -),男,江苏建湖人,讲师,硕士,主要从事电子测控等方面研究。
