汽车后视镜非定常流场的大涡模拟
2010-04-07李启良杨志刚
李启良,杨志刚 ,陈 枫
(上海地面交通工具风洞中心,同济大学,上海 201804)
0 引 言
近年来,随着汽车向高速化、舒适化发展,汽车的气动噪声问题受到广泛关注。汽车的气动噪声是一种空气动力学噪声,它是汽车在高速行驶时遇到的主要噪声。后视镜作为汽车的表面突出物,其表面较大的压力脉动以及尾部较强的旋涡使之产生强烈气动噪声,成为汽车在高速行驶时向车内外辐射的主要噪声源之一。后视镜产生的气动噪声由自身表面非定常压力导致的偶极子声源和尾部旋涡激发的四极子声源组成。因为汽车行驶速度所对应的马赫数远小于1,四极子声源发声效率远低于偶极子声源,所以其气动噪声主要由偶极子声源产生。众多研究表明[1-2],后视镜产生的气动噪声的声功率随着作用在后视镜表面压力脉动的平方的增加而增加。因此了解后视镜表面压力脉动,尾部速度脉动的大小、分布以及频谱特性,有助于揭开后视镜产生气动噪声的流动机理,从而实现后视镜气动噪声的预估和控制。
后视镜的非定常流动在过去几年成为国内外研究热点。文献[3]在RMIT工业风洞中研究后视镜不同后脸深度下,其表面压力脉动变化。文献[4]测量后视镜尾部平均压力和脉动压力,以及使用PIV测量尾部速度脉动特性。CFD的飞速发展以及计算机能力的不断提高,使得涡分离模型(DES)以及大涡模拟(LES)等一些比较高级的湍流模型能够应用到后视镜非定常流动中。LES通过对大尺度涡直接求解,小尺度涡建立模型从而捕捉到更多传统雷诺平均模型(RANS)不能捕捉的湍流信息,它有助于揭开后视镜非定常流动机理。然而处于高雷诺数下的汽车后视镜流动中,使用LES存在网格数量庞大,计算时间长等障碍,这些障碍限制了 LES在汽车后视镜等一些外流问题的应用。目前有关使用LES研究后视镜非定常流动所见不多,仅有的一些文献仍面临所采用网格数量较少,流动现象分析片面,与实验差距较大等不足。为此本文使用LES方法研究汽车后视镜非定常流场特性,通过分析后视镜表面以及紧邻后视镜的侧窗表面压力脉动,后视镜尾部速度脉动等一些非定常量,旨在深入探索后视镜的非定常流动机理,从而为后视镜气动与声学优化提供借鉴。
1 数值模型与计算方法
1.1 数值模型与网格
为了能清楚了解真实后视镜表面压力脉动以及尾部速度脉动,选取桑塔纳3000后视镜外形作为研究模型。该后视镜长度约为0.25m,宽约为0.12m。整车放置在一个长5L,宽7W和高4H的虚拟风洞中(L,W,H分别为车长,宽和高)。后视镜表面创建尺寸1.5mm~2.5mm的三角形网格,汽车表面创建尺寸7.5mm~15mm的三角形网格,如图1所示。为了能更好求解壁面边界层,在后视镜表面、汽车表面和地面创建边界层网格,考虑到LES对网格的特殊要求,设定后视镜和车身表面第一层网格对应的y+≈10。应该指出的是,这样的网格设置所导致的网格数已远比目前相关研究所采用的网格数多,但是仍与LES所期望的y+数值有一定的距离。为了评估本文研究结果的有效性,预先对单个后视镜模型,采用不同y+数值生成不同网格数,通过比较单个后视镜的各种非定常流动参数可以得到,它们的变化趋势一致,而且绝大多数关心区域流动参数的具体数值相差不大。另外,为了有效节省网格,人为创造一个长约为2L,宽约为2W,高约为2H的小计算域,在该计算域,根据已划分好的面网格,使用TGrid创建四面体网格。在剩余计算域,创建能提高数值精度的六面体网格。在两种网格交界处使用五面体网格进行交接。整个计算域初始网格总数约为750万个。为了便于比较后视镜对流场的影响,按照相同的网格处理方法创建一套没有后视镜的网格,该网格总数约为580万个。

图1 不同截面网格Fig.1 Grids of different sections
1.2 数值模拟方法
商业软件Fluent用于当前分析,它基于有限体积法对非结构网格进行数值求解。湍流场的求解基于Fluent框架中的 LES,选用Smagorinsky-Lilly亚格子模型[5]。无粘壁面条件应用到计算域的两个侧面和顶面,无滑移的壁面条件应用到地面、后视镜和车身表面。在计算域的入口指定为速度入口,并设定入口速度为39m/s,该速度对应雷诺数Re=1.23×107(以车长为特征长度),出口指定为压力出口。
计算首先使用RANS框架中的可实现k-ε两方程涡粘性传输模型[6]得到流场的定常解,然后基于该定常解,使用LES进行流场的非定常计算。考虑计算精度和计算效率两方面因素,确定非定常时间步长为5×10-4s,每一个时间步内进行25次子迭代。通过分析残差、监测后视镜和车身表面压力因数,以及后视镜尾部速度等参数,确定每个时间步长内计算收敛,所设定的时间步长能保证流动准周期内有足够样本点。通过分析监控点在0~1s的变化过程确定当计算时间超过1s后,流动处于动态稳定。整个计算一共进行4000个时间步长,最后的2000个时间步长的计算结果用于非定常的数据分析。应该指出的是,计算所采用的时间步长能保证所有测点在准周期内有足够的点,同时分析最后1s的数据能确保计算带来的平均压力因数和压力脉动因数标准差值的最大误差在0.5%。在给定的入口速度下,流体流过后视镜所需的时间约为0.003s,而流过整个计算域所需的时间约为0.5s,因此计算所采集到的样本数据是充分的。上述计算均在惠普XW8400工作站(8个2.33 GHz的CPU和16G内存)完成,所需的计算时间约为600 h,所有的计算约消耗1000h。
2 结果分析与讨论
2.1 平均流场比较
后视镜、侧窗表面压力因数的定义如式(1)所示。

式中,Cpi为当地压力因数;Pi为当地静压值,Pa;Pos为入口处的平均静压,Pa;Pod为入口处的平均动压,Pa。
图2显示LES与RANS在后视镜平均流场的计算结果。从图中的压力因数分布可以看出,较大的压力因数出现在表面的边界层区,较小的压力因数出现在分离区。后视镜前后之间的压力差根本上决定后视镜的气动阻力。后视镜尾部出现较大的回流区,回流区的长度约为后视镜当量直径的2倍。比较LES与RANS的计算结果可以发现,两者非常相似。可见,在平均流场框架中,LES结果与RANS结果能够相互验证。
2.2 非定常流场比较

图2 LES与RANS计算结果对比Fig.2 Comparison of numerical results with LES and RANS
处于高速行驶的汽车后视镜,自身的结构尺寸决定了后视镜表面出现流动分离,尾部出现不同尺度的旋涡。该流动特性不仅导致后视镜和紧临后视镜的侧窗表面出现较大的压力脉动,而且尾部还会有强烈的速度脉动。为了定量评估压力脉动和速度脉动的大小,引入了它们的标准差值,其定义如式(2)。它是统计意义下的物理量,其数值越大,表明此处脉动越剧烈。
2.2.1 标准差分析
2.2.1.1 压力脉动标准差值
为了更好了解后视镜表面压力脉动特性,在后视镜表面沿着y方向有规律地创建10列测点,每列测点按15°间隔有规律创建24个,其中人为将序号1放置在前脸分离点附近,同时序号1~14的测点位于前脸,序号15~24的测点位于后脸。选择其中5列测点的压力因数标准差值绘制成图3(a)所示变化曲线。从图中可以看出,各列测点变化规律相似,即随着测点序号从1~14增加,测点压力因数标准差值呈现先减少后增加的抛物线形状。当测点序号从15~24,测点压力因数标准差值几乎不变。从后视镜流场判断,位于前脸和后脸的交界处正是处于流动分离点,该处不稳定导致压力因数标准差值最大,即图中测点序号1和2。位于后脸的测点的标准差值由于处于尾涡拍打而比位于边界层区的测点要大。

图3 压力因数标准差值Fig.3 Value of standard deviation of fluctuating pressure factor
旋涡从后视镜表面脱落不仅导致后视镜本身有较大的压力脉动,也会使紧邻后视镜的侧窗表面出现较强的压力脉动。为此,沿着流动方向,在侧窗表面创建10列测点,每列最少有 9个,最多有13个,共115个测点。针对两种情况,在紧邻后视镜的侧窗表面选取3列测点,计算其压力因数标准差值,如图3(b)所示。从图中可以清楚看到,后视镜自身旋涡脱落导致侧窗表面很强的压力脉动,某些测点压力因数标准差值甚至超过后视镜本身,个别地方却达到0.3。接近后视镜的地方,压力因数标准差值较大,远离后视镜的地方,压力因数标准差值较小。比较相同测点有无后视镜下,测点压力因数标准差值可以看出,无后视镜时,此处压力脉动很小,甚至可以忽略。但有后视镜时,此处压力脉动变得很大,是数量级的变化。
后视镜表面以及由于后视镜而导致侧窗表面的压力脉动,是导致气动噪声的根源所在。一方面它以偶极子声源的形式向车外和车内辐射噪声,另一方面通过侧窗的振动,影响车内的声场环境。可见通过各种措施,有效降低后视镜本身以及侧窗的压力脉动,是减少汽车气动噪声的关键。
2.2.1.2 速度脉动标准差值
气流通过后视镜形成的剪切层以及后视镜尾部旋涡脱落导致后视镜尾部产生很强的速度脉动。图4给出三个高度,测点的速度脉动标准差的无量纲值。从图中可以看出,随着远离后视镜,速度脉动呈现先增加,后减少的变化趋势,大约在远离后视镜2倍直径位置,速度脉动最剧烈。比较垂直方向3列测点发现,位于后视镜下缘的测点普遍比其它2列要大,结合流场动态显示发现,后视镜下缘不断脱落出各种尺度的旋涡,正是这些旋涡的作用才导致上述的结果。另外,与无后视镜情况相比,相同测点的速度脉动在有后视镜时更为强烈,个别测点可达来流速度的0.2倍。

图4 后视镜尾部速度脉动标准差值Fig.4 Value of standard deviation of vibrating velocity behind the mirror
2.2.2 自功率谱密度分析
分别选取三个后视镜表面测点,一个紧邻后视镜的侧窗表面测点以及一个位于后视镜中截面上的测点,进行压力因数和速度的自功率谱密度分析,如图5所示。后视镜表面三个测点的自功率谱密度(PSD)图可以看出,位于同一截面测点的能量分布相似,均随频率增加而减少,在频率大于200Hz后,降幅较大。可见压力脉动主要能量集中在频率较低处。另外,相同频率下,位于分离点附近的测点的PSD值最大,其次是位于后脸的测点,最小是位于边界层区的测点,这与图3给出的规律相一致。对于位于侧窗表面的测点,通过比较其在有无后视镜两种情况的变化可以发现,相同频率下,有后视镜时,该处测点的PSD值远比无后视镜时大。另外,从该测点的PSD图可以发现,在65Hz附近出现小峰值。进一步分析发现,该峰值正是由于后视镜上下表面边界层分离导致的大涡结构所对应的脱落频率。对比有无后视镜两种情况,同样发现后视镜造成尾部较大速度脉动,这进一步验证前面结论的正确性。

图5 不同测点的自功率谱密度Fig.5 Power spectral density of different points
2.2.3 相关分析
通过前面分析可以看出,后视镜的流动是一种复杂的非定常流动,用于评估该流动的速度、压力等参数均呈现出随机信号的特征,在随机信号中却又包含着周期信号。为此引入相关分析方法,进一步分析后视镜的流场结构。相关分析是研究现象之间是否存在某种依存关系,并对具有依存关系的现象探讨其相关方向以及相关程度,是研究随机变量之间的相互关系的一种统计方法[7]。相关分析中的自相关和互相关函数分别从单个测点和不同测点的信号中,找到系统深藏的某些内涵特征。限于篇幅,本文仅从测点的互相关系数来分析测点的相关性,从而更深入了解后视镜表面以及尾部的流动特征。
信号x(t)和信号y(t)的互相关系数如式(3)所示,其大小表征不同测点的相关程度。表1给出目前比较公认的相关程度的较为细致的划分方法。其中,当相关系数为负值时,表示测点之间为负相关。

式中,ρxy为互相关系数,σx和σy分别表示信号x(t)和信号y(t)的标准差。

表1 相关程度Table1 Relationship correlation
2.2.3.1 后视镜表面
图6显示出后视镜表面各列测点与该列测点1之间的相关系数,图中测点的分布与图3(a)所示的测点相同。对于靠近侧窗的前6列测点,它们的变化规律相同,即随着测点序号的增加,其相关系数不断减少,并且从正相关向负相关过渡,然后又由负相关回到正相关。对于远离侧窗的后4列测点,虽然它们也是呈现抛物线的分布,但它们一直都是正相关。相关系数较大的地方均出现在与参考点相似的流动现象的区域。正如前面分析所指出参考点所在区域正处于流动分离点附近。可见该区域均为流动分离区域。对于远离该区域,且处于边界层区域的测点,从图中的相关系数可以看出,它们的数值较小,可近似认为不相关。
2.2.3.2 后视镜尾部
后视镜尾部水平与垂直中截面测点的相关系数分布,如图7所示。图中各列测点相关系数的计算均选取该列横坐标x=6.2m所对应的测点为参考点,因为该点位于旋涡中心。图中上半部分是水平截面相关系数分布结果。从图中可以看出,随着测点从后视镜镜面沿着 x轴增加,测点的相关系数呈现先增加后减少的变化规律。相关系数较大区域集中在涡心前后0.5D左右,该区域的相关系数均超过0.5。对照图2所示的平均流场结果可以发现,该区域正处于后视镜回流区。当远离涡心约1.5D,测点呈现负相关特性。垂直截面相关系数变化与水平截面相类似,但在后视镜下缘,且远离涡心约2D处,测点呈现较大的负相关,表明该处流动与参考点处流动相关程度较高。纵观水平和垂直截面相关系数的分布可以看出,后视镜尾部流动带有一定的对称性,该对称性在镜面到距镜面3.5D所围区域较明显,在远离镜面3.5D以后,对称性较弱。
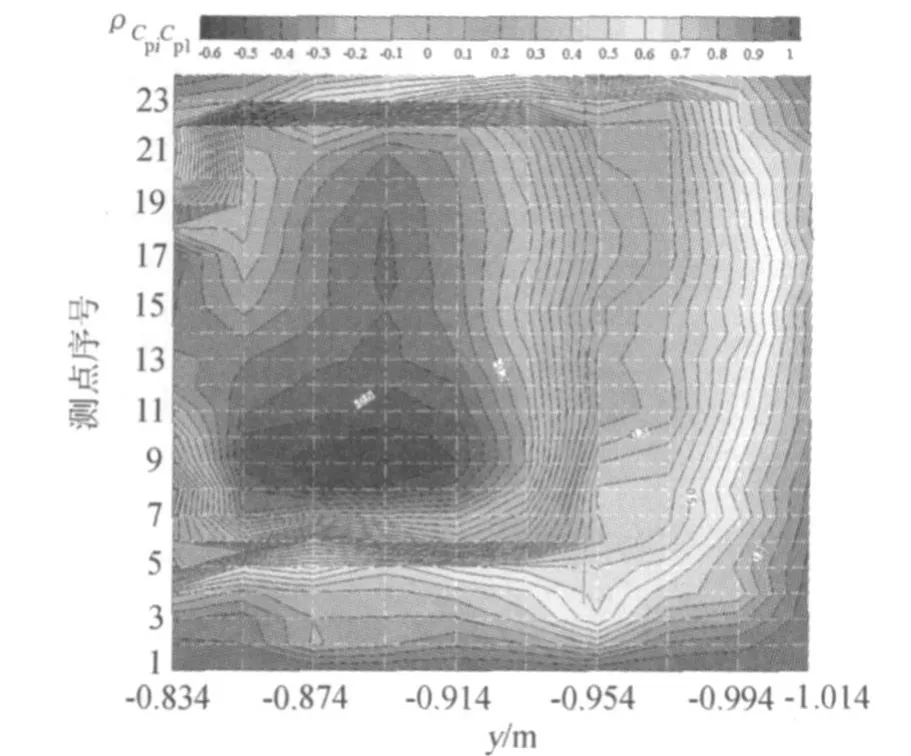
图6 后视镜表面的相关系数Fig.6 Correlation coefficient of mirror surface

图7 后视镜尾部的相关系数Fig.7 Correlation coefficient behind mirror
3 结论与展望
LES与RANS相结合对后视镜流场进行模拟,了解汽车后视镜平均流场特征。通过对比两者在表面平均压力因数分布,后视镜中截面平均速度分布发现,LES与RANS在平均流场可以起到相互验证。
后视镜表面以及紧邻后视镜侧窗表面压力因数的标准差的大小以及分布表明,后视镜自身有很强压力脉动,其脱落的旋涡导致侧窗出现比后视镜表面更大的压力脉动。后视镜尾部带有强烈的速度脉动,个别地方速度脉动标准差值可达来流的0.2倍,可见后视镜的流动具有很强的非定常性。
后视镜相同截面不同测点的PSD图表明,后视镜表面压力脉动能量分布相似,主要能量集中在频率较低处,且位于后视镜分离点附近的测点的PSD值远比位于边界层的测点的PSD值大。后视镜脱落的旋涡是造成侧窗压力脉动的主要根源,其峰值频率与旋涡脱落频率相同。
后视镜表面压力因数的相关系数分布表现出抛物线分布,在远离侧窗的测点均呈现正相关。尾部相关系数的变化反映该区域流场结构,即涡结构的大小,以及流场的对称性。
[1]ALBERT R G.Automobile aerodynamic noise[R].SAE 900315,1990.
[2]葛芚,宫镇.关于桑塔纳轿车后视镜产生的车外气流辐射声的研究[J].汽车工程,1995,17(6):379-383.
[3]FIROZ A,SIMON W.Pressure fluctuations on automotive rear view mirrors[R].SAE2007-01-0899,2007.
[4]BAHRAM K,JAMES J,CHEN K H.Experimental characterization of the unsteady flow field behind two outside rear view mirrors[R].SAE2008-01-0476,2008.
[5]张兆顺,崔桂香,许春晓.湍流大涡数值模拟的理论和应用[M].北京:清华大学出版社,2008:95.
[6]SHIH T H,LIOU W W,SHABBIR A,YANG Z,ZHU J.A new k-εeddy viscosity model for high Reynolds number turbulent flows:model development and validation[J].Computers and Fluids,1995,24(3):227-238.
[7]佟德纯,姚宝恒.工程信号处理与设备诊断[M].北京:科学出版社,2008:93-95.
