基于EASY5的船舶舵机电液伺服系统建模与仿真
2010-04-01包青
包 青
(南京板桥汽渡管理处,江苏南京 210012)
0 引言
舵机是保持或改变船舶航向,保证安全运行的重要设备,目前稍大一些的船舶大部分采用液压舵机。液压舵机分为阀控型和泵控型两种。阀控型舵机系统简单、造价低、控制方便,但传统大多采用一般的换向阀,液压冲击较大,可靠性较低。随着自动化技术和液压技术的发展,电液伺服系统以其控制精度高、响应速度快、信号处理灵活、输出功率大等优点[1],在船舶舵机系统中应用越来越广泛。计算机仿真技术的发展,使得液压系统的动、静态特性可以通过仿真分析来得到。但传统的仿真一般是先建立数学模型,然后再进行仿真分析,对工作者要求较高并且十分复杂。而采用EASY5软件进行的图形化建模方法,只需按要求连接组建和设定参数,无需建立数学模型,并且EASY5采用多种“开-关状态”判断逻辑处理非线性和不连续状态方程,结合多种改进的变步长、定步长积分算法,使得分析结果逼真、可信[2]。本文采用 EASY5对某船舶舵机电液伺服系统进行建模并仿真,分析了系统的动、静态特性,分析结果对熟悉系统性能,优化系统提供了理论依据。
1 舵机电液伺服系统的组成和工作原理
舵机电液伺服系统主要由油源、滤器(粗滤器、精滤器)、溢流阀、电液伺服阀和油缸等组成。在该系统中电液伺服阀起电信号和液压信号之间的转换作用,同时又起信号放大作用,其性能的优劣对系统的控制精度、系统的稳定性及可靠性影响很大,是系统的核心元件[3]。其液压系统原理图如图 1所示。
该舵机电液伺服系统具有完全相同的左右两套液压回路,在不同工况下可以单机工作也可以双机组并联工作。单机工作时,从油泵P1输出的压力油经精滤器 F1后,清洁的液压油进入串接的电液伺服阀,当电液伺服阀收到来自操舵仪的放大控制电信号时,电液伺服阀的阀心移动,输出液压能源进入油缸C1,使油缸C1活塞杆产生位移,从而推动转舵机构,使舵叶转动。舵机转动方向及角度由操舵仪给定信号决定,当舵机到位时,控制信号与反馈信号的偏差为 0,放大器没有输出信号,电液伺服阀回到 0位(中间位置),舵机便停止在被控制的位置上,系统的压力由溢流阀YR1决定。此外,当油箱液位低于某一指定值时,液位继电器KY1接通报警,提示管系泄漏或油液自然耗损。当精滤器 F2进出口压力差大于0.35MPa时,差压继电器KP1接通报警,提示应更换滤芯。
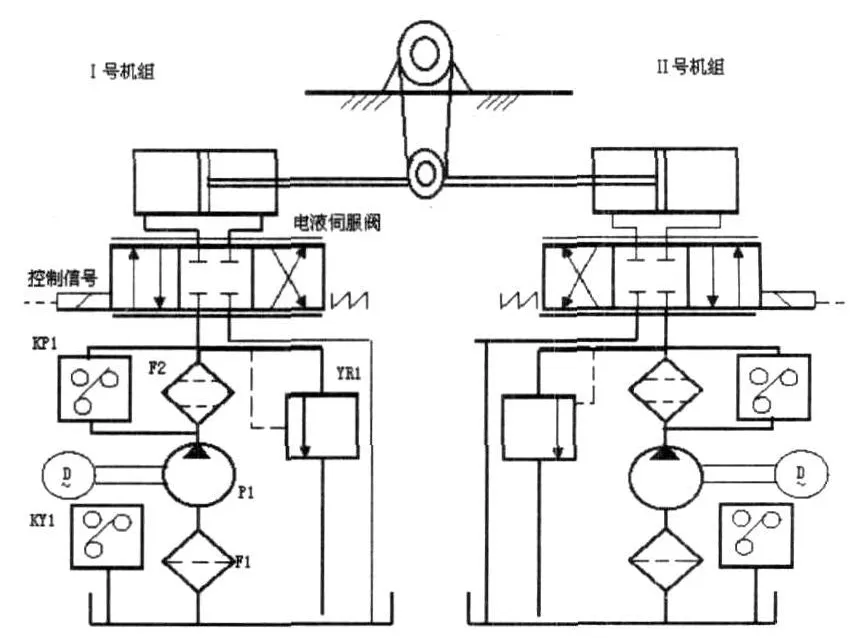
图1 舵机电液伺服系统原理图
2 在EASY5中模型的建立
根据系统的组成,在EASY5中建立单机运行工况下的仿真模型如图 2所示[4]。建模中系统主要参数的设定如下:泵的转速为150r/min;每转排量为150cm3/r;管路的水力直径为1cm;伺服阀的自然频率为120Hz;阻尼比为 0.8;油缸无杆腔面积为25cm2;有杆腔面积为12.5cm2;负载等效弹簧刚度为100N/cm。
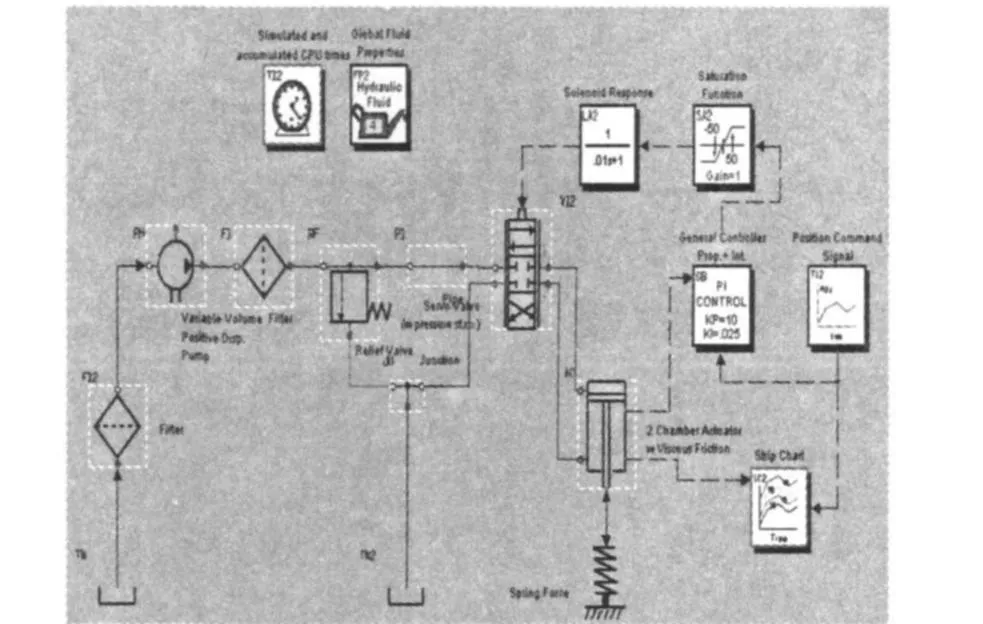
图2 舵机电液伺服系统在EASY 5中的仿真模型
3 仿真与结果分析
实际操舵时,系统输入的是舵转动的角度信号,其与活塞杆的位移信号存在一一对应关系,以舵角转动 5°的情况为例进行仿真分析。当舵角转动 5°时,活塞杆移动 10cm,设定系统活塞杆位移按照图3所示的指令信号运动。仿真运行 20s,采用吉尔算法,为表示方便,无杆腔用“extend”,有杆腔用“retract”表示,指令位移信号用“commandposition”表示,活塞杆反馈位移信号用“actuatorposition”表示。在 1s时,系统突加一个舵角转动 5°的信号,当舵角转动到5°时(活塞杆移动10cm),保持5°舵角到16s;16~18s时,缓慢移动舵角回归 0位;18~20s时舵叶在 0位保持不动。
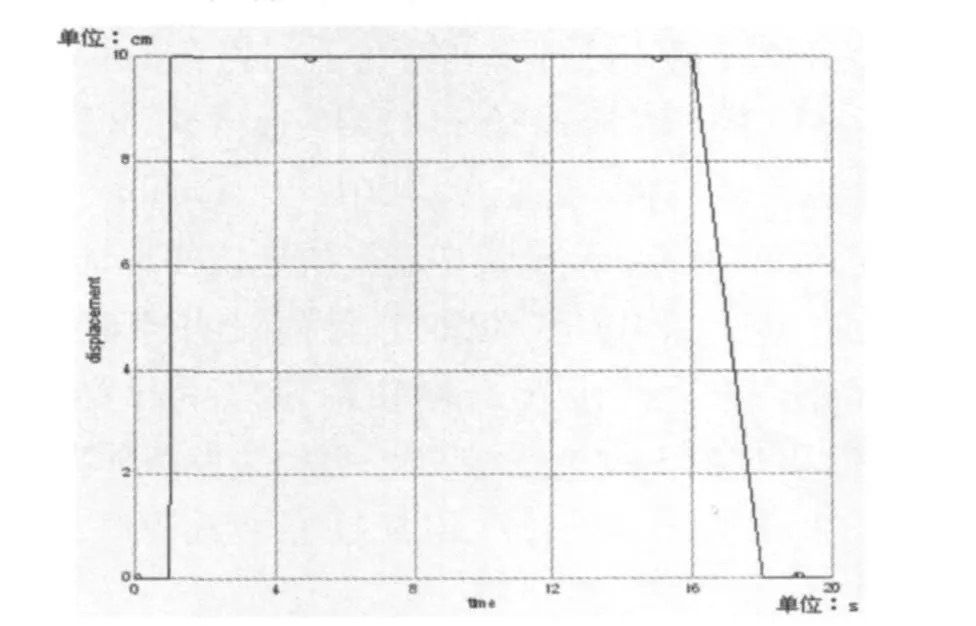
图3 与舵角指令对应的位移指令信号
图4~图 5为系统中一些参数的仿真结果。
从图4中可以看出:控制信号与反馈信号曲线非常相近,说明系统能很好地执行转舵信号。在系统突加一个 5°的转舵信号时,系统响应过程大约经历了0.7s,过渡过程反映了系统的动态特性,说明系统过渡过程品质良好。当平稳操纵舵角回归 0位时,系统能够准确地执行发出的舵角信号指令。
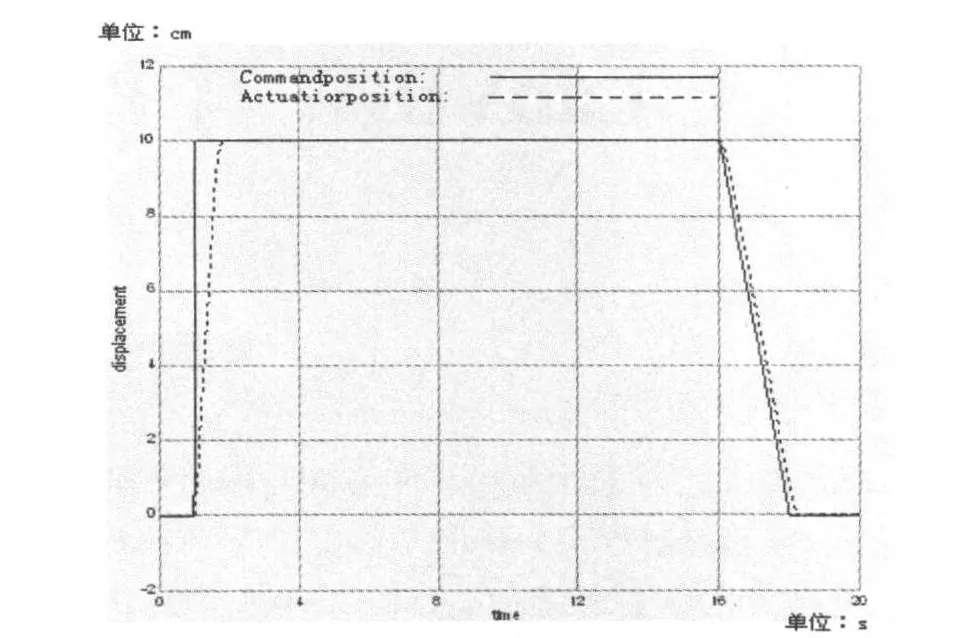
图4 指令信号与活塞杆反馈位移信号比较
图5中可以看出:在突加转舵信号时,系统的压力波动较大。当到达指定舵角位置后,液压缸两腔压力能够很快达到稳定,并且压力波动角小,说明伺服阀的比例增益适当,动态特性较好。当慢施加转舵信号时,系统压力波动较小,与实际情况吻合。
在仿真过程中,某些参数设定的好坏对系统的性能影响很大,比如伺服放大器的放大倍数(Ka)就直接影响到输出油液的压力和质量流量;还有活塞的位移。图 6~图 8给出了在不同的积分环节放大倍数下系统活塞杆位移随时间的输出特性。
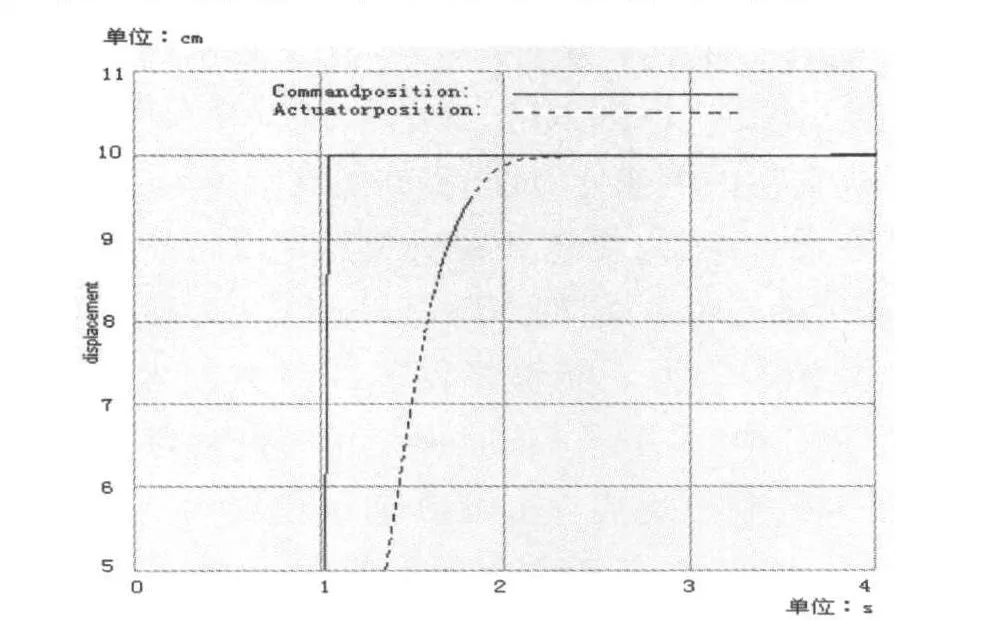
图6 Ka=5时位移特性
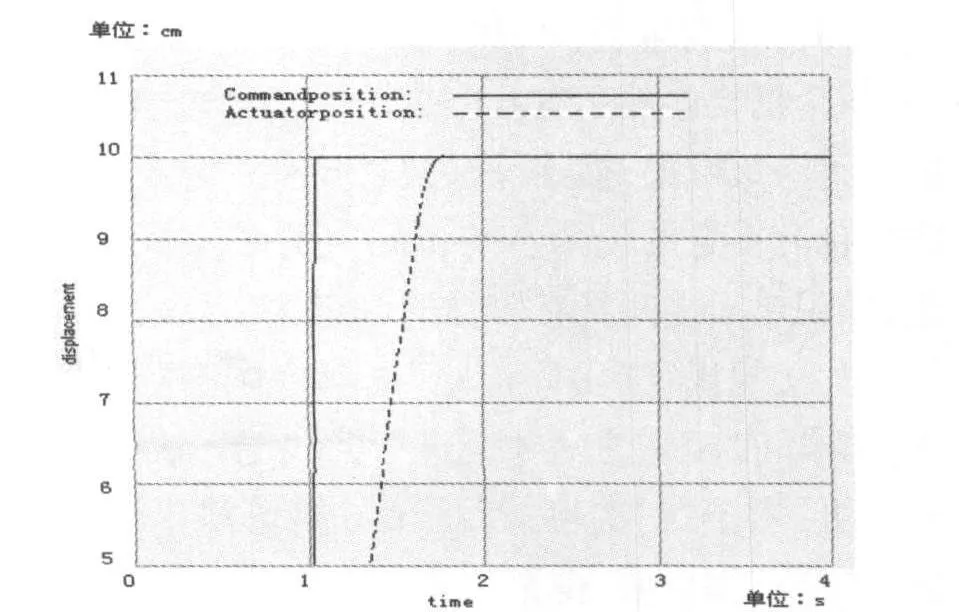
图7 Ka=15时位移特性
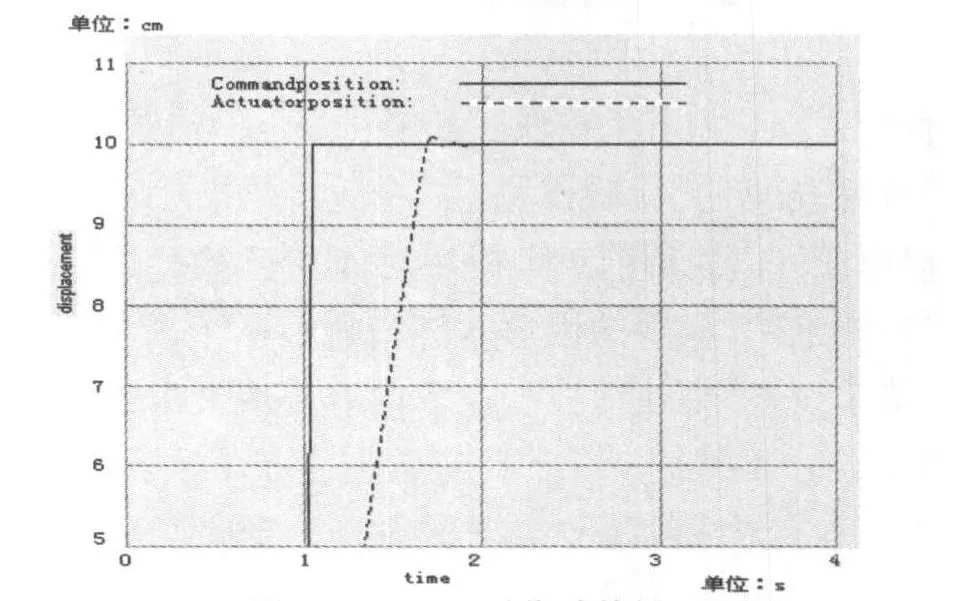
图8 Ka=30时位移特性
从图6、图7、图8的比较中可以发现,若放大倍数过大,系统的响应速度很快,但是稳定性较差;放大倍数过小,则响应速度又太慢,也不是所期望的。在EASY5中可通过参数的稳态分析功能,得出在Ka=10时,系统的过渡品质良好,这种分析方法对优化系统性能有重要参考价值。
4 结论
本文以某船舶舵机电液伺服系统为研究对象,采用EASY5仿真软件建立了其动态过程仿真模型并进行了仿真分析,仿真结果与实际运行情况基本一致,反映了所建模型的正确性,也很好地反映了整个系统的特性。仿真过程中可及时修改参数,并能直观地得出仿真结果,方便实用,同时利用EASY5独特的稳态扫描分析功能,可方便地分析出系统中某些参数变化对系统稳态的影响,这对船舶舵机液压系统的性能分析和优化设计有着重要的意义。
[1] 雷天觉,等.新编液压工程手册[M].北京:北京理工大学出版社,1998.
[2] 程钢,王红岩,王良曦.基于MSCEasy5的车辆液压控制阀动态特性仿真[J].计算机辅助工程,2006,15(S):163-164.
[3] 赵平格,等.液压传动与控制[M].北京:冶金工业出版社, 194-197.