控制网络的综合调度及其在双缸同步控制中的应用
2010-03-26杨丽曼李运华
杨丽曼,李运华
(北京航空航天大学 自动化科学与电气工程学院,北京100191)
在网络环境下,通过现场总线、工业以太网或无线网络将分散的、智能化的现场检测、控制及执行设备作为网络节点连接,实现资源共享和实时协调控制,将这样一类机电系统称为网络控制系统 NCS(Networked Control Systems)[1-2]。 一个多任务多回路的复杂NCS,其网络调度问题是将有限的网络带宽按照某种静态的或动态的规则在各传输任务之间合理分配,满足网络的可调度性,即所有传输任务能够在任务截止期前到达目标节点[3],并期望获得良好的网络服务性能QoS(Quality of Service),如合理的带宽利用率、较低的包丢失率和时延等,主要工作包含采样周期的优化和带宽调度策略设计。
由于控制与网络传输的交叉影响,在系统设计时需综合考虑网络调度和控制算法,因此,调度与控制的协同设计越来越受到关注。从调度的角度来看,代表性工作有,M S Branicky提出的控制器和网络调度算法同步设计(Co-design)方案,以满足系统稳定性的采样周期上界作为约束条件,基于RM算法寻求最优的采样周期序列[4]。Walsh等人对于特定结构的NCS设计的辅助调度策略,先设计反馈控制器使系统渐进稳定,再利用Lyapunov稳定性理论得到最大允许传输间隔(MATI),然后提出一种动态调度方法 MEF-TOD满足MATI的要求,保证系统全局指数稳定[3]。与此类似,H.S.Park设计的基于最大允许时延(MADB)带宽分配策略[5]。事实上这几种方法都是假设系统模型精确可知,先行设计控制器,由稳定性理论获得系统对时延的容忍度,再以网络可调度为目标进行网络规划。延续这一协同设计思想,L.Zhang对MIMO系统研究了周期通信序列调度与控制器设计问题[6],YTipsuwan与M.Y.Chow提出基于QoS的模糊增益调度算法,调节PI控制器增益[7],王艳等人设计的一种动态调度策略,通过估计带宽占有率实时调整各回路采样周期以克服网络约束,但相应的控制器设计很复杂[8]。以上这些方法兼顾了系统的稳定性和网络可调度性,但依赖于系统模型,且约束较多,设计过程复杂,因此虽然在实验室环境下有诸多成果,但在工程实际中难以实现。
这里提出一种易于工程实现的网络调度策略,在分析网络传输任务和被控对象的基础上,通过估计网络负载和频谱能量分析法粗拟各控制回路的采样周期范围,采用非抢占RM算法进行带宽分配,确定各任务周期和优先级配置,最后以双缸同步控制的NCS为对象进行仿真验证。该方法综合考虑被控对象、控制要求和通信约束,但不依赖于模型,其简单性和灵活性能够适应工程实际要求。
1 网络传输任务的特点和基本描述
网络传输任务根据数据性质的不同,可分为周期任务、猝发任务和非实时任务。需要发送实时性周期数据的称为周期任务,例如开环或闭环控制回路中将按照采样周期产生采样信号和控制信号;猝发任务是由事件触发的,产生的猝发数据具有一定的时效性,例如安全报警由状态超限这一事件触发。此外,在系统配置、维护和数据整理阶段,将产生大字段的非实时性数据,对控制性能的影响不大,因此在网络规划和控制器设计时可不作考虑。
这里采用网络数据流图描述和分析网络传输任务。网络数据流采用带有任务标识的有向图进行表达,其中包含网络节点、特征数据流和任务标识3部分。这里假定某NCS系统具有4个周期任务和1个猝发任务,其网络数据流如图1所示。
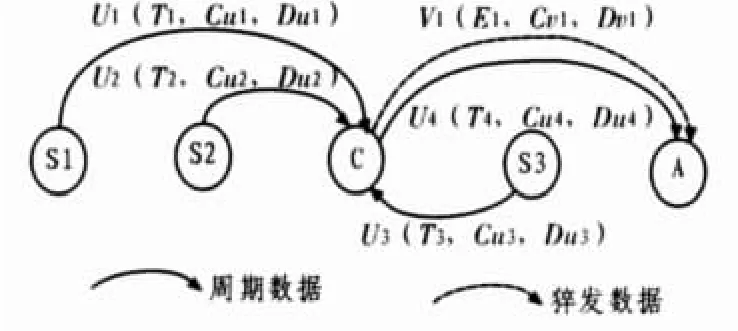
图1 网络数据流
图1中, S1、S2、S3、C和A表示网络上的节点。任务标识:Ui(Ti,Cui,Dui)∈(周期任务),Vi(Ei,Cvi,Dvi)∈(猝发任务)。有向线段表示特征数据流,每个任务都带有三元任务属性标识。周期任务U的3个属性标识T、Cu、Du分别代表传输周期、发送数据量和任务截止期,猝发任务V的3个属性标识E、Cv、Dv分别代表任务触发条件、发送数据量和任务截止期。
通常每个任务要发送的数据量是一定的,以字节为单位。猝发任务的触发条件和截止期属性根据控制要求直接确定。周期任务的传输周期和截止期一般情况下是一致的,除非网络时延很大或存在诸多不确定因素,比如遥控系统,在负载高峰期时延通常是几倍的采样周期。而传输周期本身与控制任务的采样周期相关,受到被控对象特性、控制目标和网络承载能力等多方面因素的制约。
2 采样周期的范围确定
有研究表明,网络控制系统中,采样周期和控制性能的关系不同于一般的数采样系统,在控制性能可接受的范围内,采样周期有上界和下界,上界由系统频率和具体的控制要求决定,下界根据网络容量即网络负载的饱和值进行估计[2]。根据这样一个基本思路,引入假频能力分析法给出采样周期的范围确定方法。
对于一个多任务多回路的NCS,系统正常工作的必要条件是控制网络的平均工作点负载低于饱和值,描述为带有周期任务集={U1,U2,…UM}和猝发任 务集={V1,V2,…VN}的NCS应满足以下条件:

式中,Ti是任务Ui的传输周期,Qi是该任务一次发送的数据量大小,根据协议规定的数据包长度和任务数据量Cui计算得到,以bit为单位,dbit是发送1比特位所需时间,由带宽决定,s代表在Ts时间段内产生猝发数据量的上界,根据猝发任务属性中的触发条件Ei和数据量Cvi来估计。
周期传输任务根据控制目的的不同进一步区分,由开环或闭环控制衍生的从传感器到控制器和从控制器到执行器的数据传输任务称为回路任务,任务周期和发送数据量标记为Tbi和Qbi。除此以外的周期任务称为非回路任务,例如对温度、压力、转速等工作状态的监测和显示,采样周期根据功能要求和实际情况选取,任务周期和发送数据量标记为Tki和Qki。回路任务的采样周期首先要满足普通数采系统的设计要求,这里从频谱能量分析的角度,给出系统的假频能量系数r、时间常数T0和采样周期T之间的关系:

1)准确性优先选取原则 0.02≤r≤0.05,要求4.04≤T0/T≤10.13。此时,假频能量占频谱总能量的2%~5%,因假频现象产生的频谱能量相对误差一般不超过系统的允许误差。
2)快速性优先选取原则 0.05≤r≤0.25,要求0.07≤T0/T≤4.04。此时,假频能量占频谱总能量的5%~25%,因假频现象产生的频谱能量相对误差不大于系统的1/4超调误差,由于系统的快速性主要依赖于低频特性,通常在低频段允许1/4超调误差。另外,为了兼顾准确性和快速性,可选取假频系数0.04≤r≤0.1。
式(2)是由一阶系统的分析结论推广得到的,对于二阶和高阶系统来说,需要先求出系统的近似一阶时间常数T0。根据控制要求,选择合适的r(按上限取值),得到回路任务的采样周期上界为:
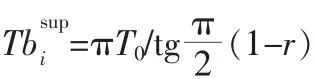
假设实际的采样周期和上界之间存在比例系数 αi,有则式(1)重新写为:

式中,m、n分别是回路和非回路任务数,m+n=M。λ为非回路周期的收放系数,初始为1。由于控制回路以外的数据主要是传达一些辅助信息,重要性低于回路数据,必要时可增大λ以减小网络负载。
为了确定回路周期的范围,可先假设αi=α,取λ=1,则由式(3)推出:
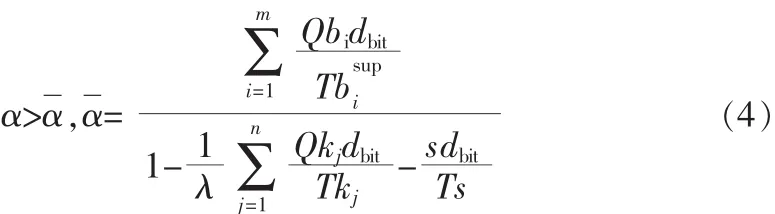
此外对于通过广域网或Internet构成的控制网络,还要考虑干扰负载,通常根据经验数据或时段峰值测量加以估计,从式(3)右端减去干扰负载可能占用带宽的比例。
适当选择α后,并不能确定各回路任务的周期,这是因为实际上αi≠α,α仅给出了一个平均值,用其粗拟采样周期,然后通过设计适当的调度算法进行检验、调整和优化。
3 网络调度策略
网络调度和计算机实时系统关于CPU时间的调度并很相似,因此有许多研究成果可以借鉴。例如,静态的速率单调RM(Rate Monotonic)调度算法、时限单调 DM(Deadline Monotonic)调度算法,动态的最早任务期限优先EDF(Earliest Deadline First)、最小紧急度优先 LLF(Least Laxity First)等[9]。其中RM被证明是最优的静态调度算法,可应用到基于优先级的争用式网络调度中。由于数据在网络中的传输过程不能被任意中断,因此传输任务是非抢占式的。定理1阐述了非抢占式RM算法[10]。
定理 P个相互独立的、非抢占式的周期任务,周期越小优先级越高,以优先级降序为标记(i=1的优先级最高,i=P的优先级最低),任务可调度的充分条件是,所有任务(i=1,...,P)都满足

式中,Ti表示任务i的周期,di表示任务i的资源占用时间,表示任务i的最大堵塞时间,即被低优先级任务占有的最坏情况
1)以猝发任务中的最小截止期为虚拟任务周期(预留发送时间),标记为
2)选取最大的猝发数据长度Qs,计算数据传输时间 d1=Qsdbit,Qs由估计得到;
3)确定非回路任务的采样周期 λTkj(j=1,…,n);
5)将所有的周期任务按照周期大小以升序排列,并以此为优先级排序标准,对于闭环回路中的传输任务,设定从传感器到控制器的数据优先于从控制器到执行器的数据,重新确定任务周期标记 Ti(i=2,..,3M+1),计算相应的传输时间 di=Qidbit。
6)数据传输时间di就是任务对网络资源的占有时间,采用定理1检验上述NCS的网络可调度性,将所有传输任务的Ti和di带入式(5),如满足则证明网络可调度。如果不满足条件,回到4),重新选取α,修正回路任务周期。
上述带宽分配方法中,将猝发任务虚拟为优先级最高的周期任务,且按照最坏情况考虑,是采用了带宽预留的概念,理论上收缩可调度性条件,但也相应减轻负载压力,目的是保证重要数据的截止期。控制回路内部,控制器总是基于最新的传感器数据计算控制量的,因此相同的采样周期下,从传感器到控制器的传输任务优于从控制器到执行器的任务。
4 仿真研究
以工程机械中常见的顶推系统双缸同步控制为例,应用本文提出的NCS网络规划方法,进行仿真验证。以两路阀控缸作为执行元件的顶推系统,通过位移反馈和压力监测实现双缸同步动作的闭环反馈控制,以CAN协议通信构成NCS系统,网络上有6个节点,系统网络拓扑如图2所示。
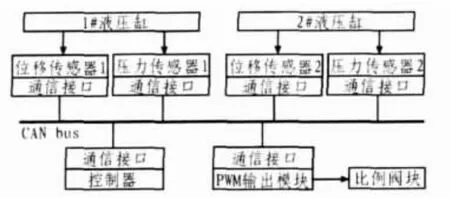
图2 双缸顶推系统NCS拓扑结构图
采用主从控制方式,控制器的输出分别驱动各自的电液伺服阀,使2#液压缸位移输出跟踪1#缸输出达到同步运动的效果。此外还需检测两缸的出口压力值,当压力差超过某一范围时,应给出报警信号并启动保护程序。对照系统拓扑结构图可看出,两路闭环控制中的位移反馈和压力监测以及控制器输出将产生周期性的网络传输任务,压力差超限保护动将产生猝发任务。表1给出系统的主要任务。

?
表1中的双缸同步闭环控制任务的被控对象模型可进一步描述为:

式中,Y1,Y2为位移输出;U1,U2为控制量;F1,F2为负载力。
由任务列表画出传输任务的网络数据流,如图3所示,三元任务属性中的采样周期和截至期通过网络规划确定。

图3 双缸顶推系统的网络数据流图
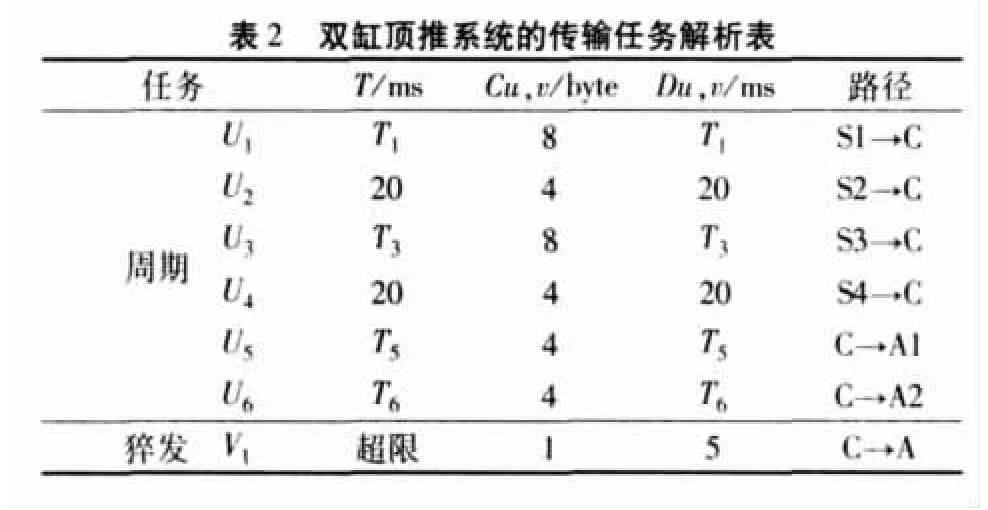
设定网络带宽为110 kbit/s,首先根据网络数据流图给出系统的传输任务解析表如表2所示。可以看到,所有任务的有效发送数据量已确定,非回路周期任务U2和U4的采样周期拟设为 20 ms,周期任务 U1、U5和 U3、U6的周期待定,但有,T1=T5,T3=T6,截止期和任务周期一致。假设每10 ms猝发任务不超过2次,猝发数据量不超过2个有效字节。
?
根据2个回路的被控对象模型,得到近似时间常数T0分别为30 ms和31.4 ms,按照兼顾确定性和快速性原则,选取假频系数r=0.1,计算回路任务的周期上界15.6 ms,为了简化计算统一取为Tbsup=15 ms。将已知数据带入式(4),取 λ=1,得到=0.32,应用上述带宽分配方法,最终得到 a=0.7,U1、U3、U5、U6的周期均为 10 ms, 优先级按照 V1、U1、U3、U5、U6、U2、U4的顺序依次降低,经验证满足网络的可调度性。采用Truetime软件对该系统进行仿真,按照上述参数设置网络及调度策略,并在控制器节点中以1 ms为周期,20%的概率随机产生猝发数据,模拟最坏情况下的猝发任务。观测在2.4 s的运行时间内各周期任务的负载变化,0.6~0.8 s的结果如图4所示。
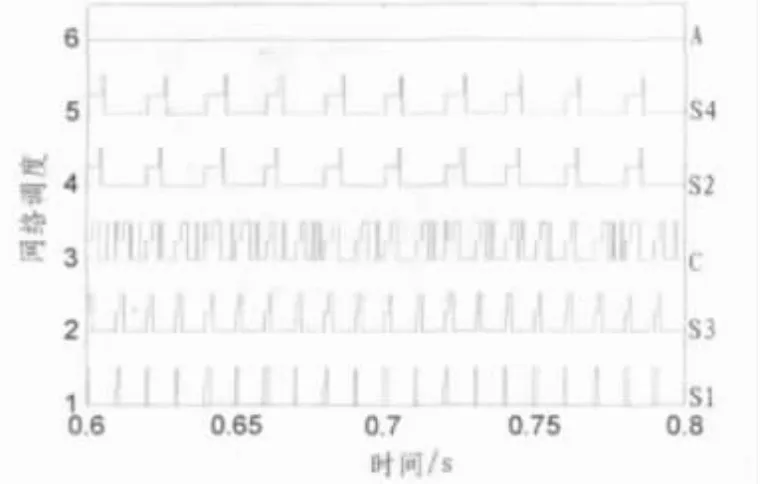
图4 各节点产生的网络负载
统计测量结果,传输任务失去截止期的比例为0.32%(和设定的包丢失率一致),小于阈值1%,网络可调度并且时延和时延抖动不大,为控制器的设计提供了良好的网络环境。
5 结论
按照兼顾控制性能和网络传输的NCS综合设计思想,本文提出一种新的网络调度方法,并结合实例给出具体的实现方案。通过估计网络流量,并引入假频能量分析来选择控制回路的采样周期范围。然后基于非抢占式的RM静态调度算法提出一种带宽的分配策略,确定各网络传输任务的周期和优先级配置,从而满足网络的可调度性。该方法中,网络调度不依赖于系统模型,易于工程实现。同时,以带宽预留的思想全面考虑NCS中的周期任务和猝发任务,并成功解决RM算法应用到网络调度时遇到的困难。最后,以工程机械中常见的顶推系统双缸同步控制为例,对所提出的调度方法进行仿真研究,验证该方法的有效性。
[1] Walsh G C,Ye H.Scheduling of networked control systems[J].IEEE Contr.Syst.Mag., 2001,21(1):57-65.
[2] Lian F L,Moyne J R,Tibury D M.Network design consideration for distributed control systems[J].IEEE Trans.Contr.Syst.Technol,2002,10(2):297-307.
[3] Hespanha J,Naghshtabrizi P,Xu Y.A survey of recent results in networked control systems[J].Proceedings of the IEEE,2007, 95(1):138-162.
[4] Branicky M S,Phillips S R,Wei Zhang.Scheduling and feedback co-design for networked control systems[C]//Proceedings of the 41st IEEE Conference on Decision and Control 2002,12:1211-1217.
[5] Park H S,Kim Y H,Kim D S,et al.A scheduling method for network-based control systems [J].IEEE Trans.Contr.Syst.Technol., May 2002, 10(3):318-330.
[6] Zhang Lei, Hristu-Varsakelis,Dimitrios.Communication and control co-design for networked control systems[J].Automatica,2006,42 (6):953-958.
[7] Tipsuwan Y,Chow M Y.On the gain scheduling for networked PI controller over IP network[J].IEEE Trans.Mechatronics,2004,9(3):791-498.
[8] 王 艳,陈庆伟,吴晓蓓.网络控制系统中动态调度策略与控制器的综合设计[J].控制与决策,2007,22(6):680-684.
[9] Burchard A,Liebeherr J.New strategies for assigning real-time tasks to multiprocessor Systems[J].IEEE Trans.On Computers,1995,44(12):1429-1442.
[10] Sha L,Rajkumar R,Lehoczky J.Priority inheritance protocols:an approach to real-time synchronization[J].IEEE Trans.on Computers,1990,39(9):1175-1185.