特殊无位置传感器无刷直流电机的起动分析
2010-03-23谢白杨李进军杨成忠檀深秋
谢白杨,李进军,杨成忠,檀深秋
(1.杭州电子科技大学科技处,浙江杭州310018;2.杭州电子科技大学自动化学院,浙江杭州310018)
0 引 言
左心室辅助装置(LVAD)是辅助而不是替代心脏工作的一种机械泵,当病人出现心室衰竭,LVAD基本上可以接替左心室的泵功能[1]。本文设计了一种血泵和驱动电机合为一体的人工心脏血泵,结构比较特殊,是专门为开发研究植入式左心室辅助装置而设计的。由于最终要植入人体内,所以对电机的体积、重量和性能等方面都有特殊的要求,因此对电机的检测和起动有了更高的要求。
1 电机结构和工作原理
1.1 电机的结构
左心室辅助装置的电机结构示意图如图1所示:定子为驱动线圈,每相驱动线圈分为顶部和底部两个部分;转子为永磁磁铁,极对数为2,转子在顶部线圈正下方。定子线圈采用三相星型连接,磁场垂直于水平面。电流通过定子线圈产生的电枢磁场,与转子磁场相互作用,从而推动转子旋转。尽管本文所用电机结构特殊,但是其工作原理与无刷直流电机相同。
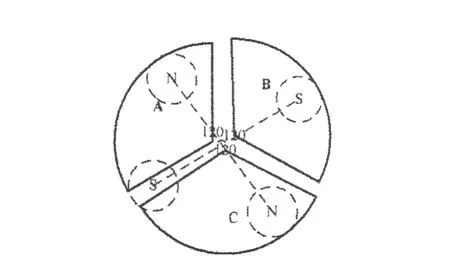
图1 电机结构示意图
1.2 工作原理
本实验中电机采用星型连接,三相全控方式,两两导通的状态运行。控制系统上电之后,主控芯片为XC866的控制电路将控制信息传送到驱动电路IR2136中[2],从而控制功率开关器件,进而驱动电机的运转。电机的控制系统工作原理框图如图2所示。
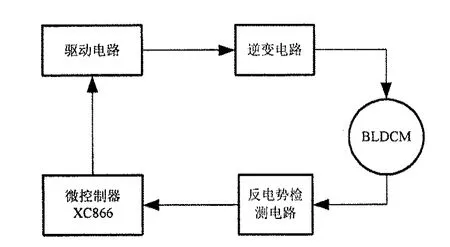
图2 电机控制系统工作原理框图
2 反电势过零点检测
2.1 反电势过零点检测原理原理
无位置传感器无刷直流电机受合成磁场的作用,转子会沿着一定的方向连续转动,就会在导体中产生感应电势,该电势方向与绕组中电流的方向相反。这个电势就是反电动势,简称反电势。
如图3所示,在一个周期内反电势有两个过零点,并且每次过零点都超前下次换相点30°电角度。因此只要在电路中检测到反电势过零点,再滞后30°电角度就可以检测到下次换相时刻。
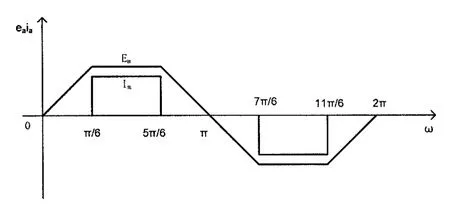
图3 梯形波反电势与方波电流

式中,un为中性点电压,ux为悬空相的端电压,ex为反电势。
2.2 端电压检测法
目前成熟的的转子位置检测方法大部分都需要电机中性点的引出,但是这将会增加电机植入人体的难度并且导致系统抗干扰性能降低。反电势法中的端电压法简单可行,而且应用广泛。所以本文选用端电压法来实现对反电势过零点的检测,端电压法原理如图4所示。
图4中ua为A相端电压用,为相电压,表示中性点相对于电源负端的电压。任意时刻只有两相绕组导通,导通的两相绕组中电流大小相等、方向相反,第三相绕组悬空,电流为零。由式1可得:

假定该时刻A相绕组悬空,B、C两相绕组导通,则B、C两相绕组的反电势大小相等、方向相反,A相的相电压等于反电势,则:

将式3带入2可得:
由电机的电压平衡方程可得:
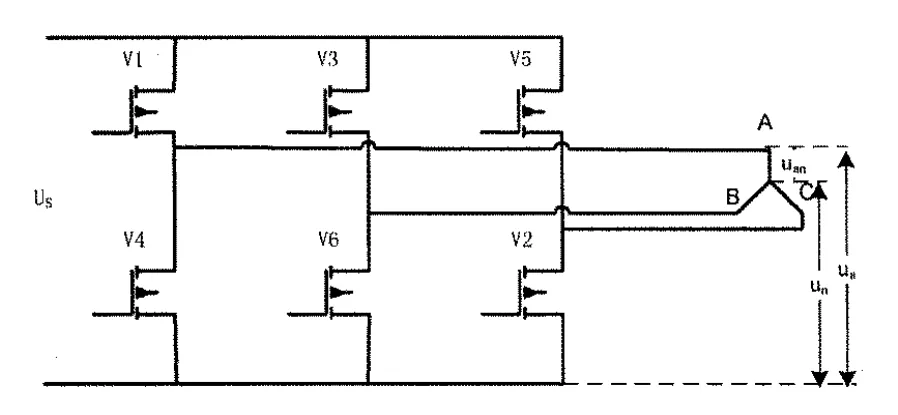
图4 端电压法原理图

将式4代入式2可得:

由此可得,反电动势为零的时刻就是当悬空相的端电压等于电源电压的一半时刻。端电压检测法的实际应用电路如图5所示:为了避免控制电路中的扰动,提高检测的准确性,电路中选用了RC滤波电路[3],而RC电路会产生相位滞后的问题。以电路中的A相位为例,UA为端电压,Ua为滤波后的输出电压,f为反电势频率,则:

相位移位为:

因此电路中相位移延迟角为:

要实现反电势过零点的准确检测需要解决两个问题[4]:首先,由于电机电抗的存在,即使某相已经截止,仍会通过上下桥的续流二极管续流,在续流的期间内无法正确检测到反电势过零点的问题。所以从换相开启定时器到检测到反电势过零点,若检测到的反电势过零点所需要的时间小于转子转过15°或者大于120°电角度所需要的时间,则判定该反电势过零点无效,判定此次检测失败。这就有效的提高了检测的准确性。其次,检测过程中存在虚假反电动势过零点的问题。因此检测到反电动势过零点之后,要检测未导通相的端电压是否等于电源电压的一半,同时在程序中认为若检测到的端电压的值处于电源电压的一半的适当的区间内,都可以认为检测到了反电势过零点,而具体区间的设定要在电机调试的过程中获得。
3 电机启动方法研究
由于无刷直流电机在低速时反电势为零或很小,无法用来判断转子位置,因此反电势法需要采用特殊的起动技术。本文采用目前比较成熟的三段式起动技术,首先对转子进行预定位,然后采用外同步的方式使电机逐步加速至预定速度,当可以得到稳定的反电势过零点信号时,切换到自同步方式进行。在转子到达预定的位置后,起动换相表开始作用。而实际情况是电机前期需要快速起动,而后期电机需要在比较平稳的外部速度下进行切换。因此为了避免扰动,将换相时间表拆分为两个阶段进行处理,第一个阶段是电机的加速阶段,换相间隔快速减少;第二个阶段是外同步到自同步的切换阶段,换相间隔逐渐减少。两个阶段的程序流程图如图6、7所示:

图6 加速阶段流程图
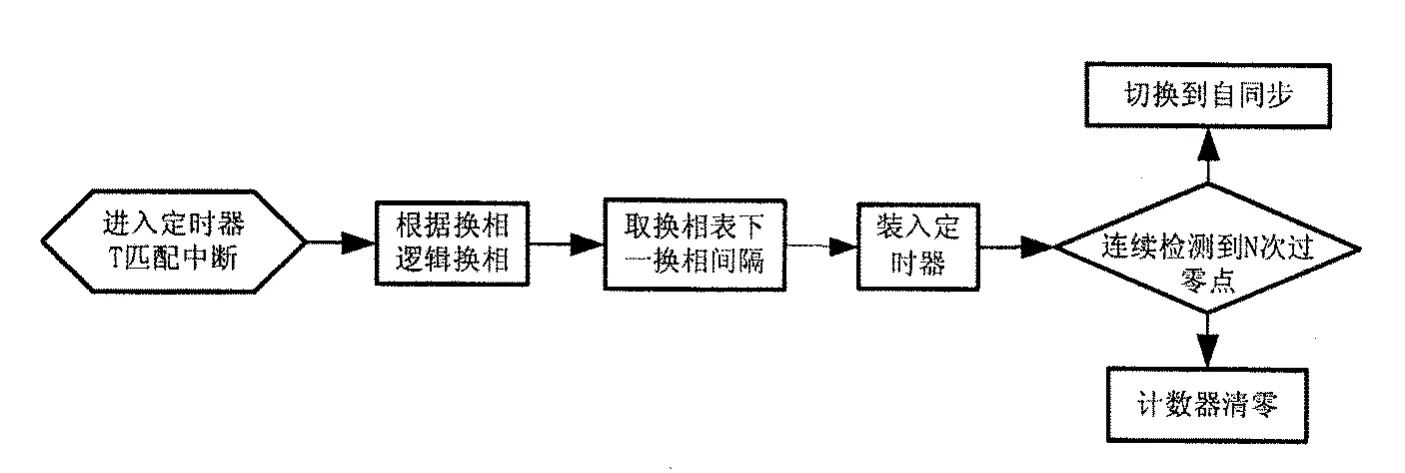
图7 切换阶段流程图
由文献5可知,选择3个点(1,7 000)、(100,2 500)、(250,1 500)进行MATLAB仿真,可以得到电机的外加速起动曲线,如图8所示,其中X轴表示电机的换相次数,Y轴表示电机的换相时间在定时器中的数值。然后用指数关系对曲线进行拟合,所得结果为函数:

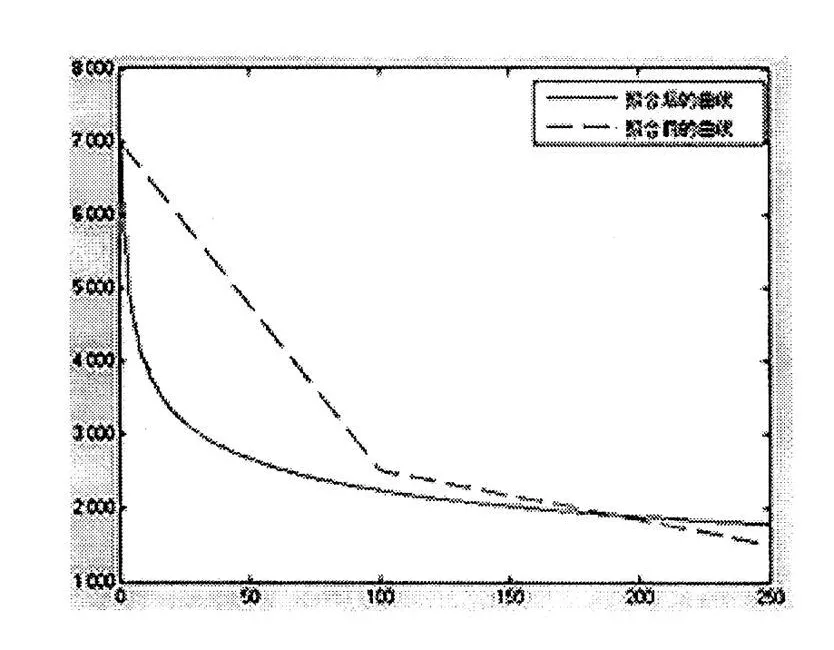
图8 仿真得到的外加速起动曲线
确定的数据点数越多,误差就越小,同时增加的数据点也就增加了不确定因素。所以本文采用最简单的三点法,从拟合好的换相曲线上取出250个数据点,建立换相时间表。最后根据建立好的换相表,利用检测反电势过零点法实现平稳的切换。
对起动过程进行仿真实验,优化前失步时的电流波形如图9所示,优化后成功起动时的电流波形如图10所示。由图可知按此方法建立的换相时间表应用到电机外同步加速过程中能够获得较好的起动效果。
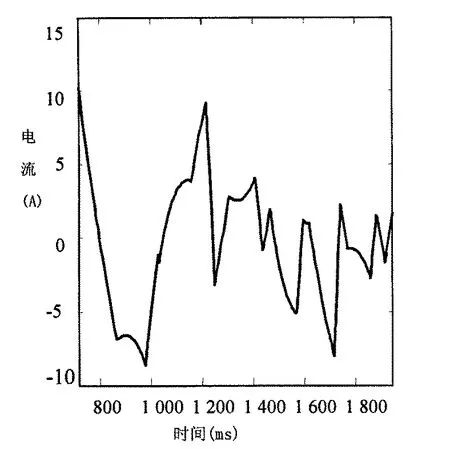
图9 优化前失步时的电流变化图
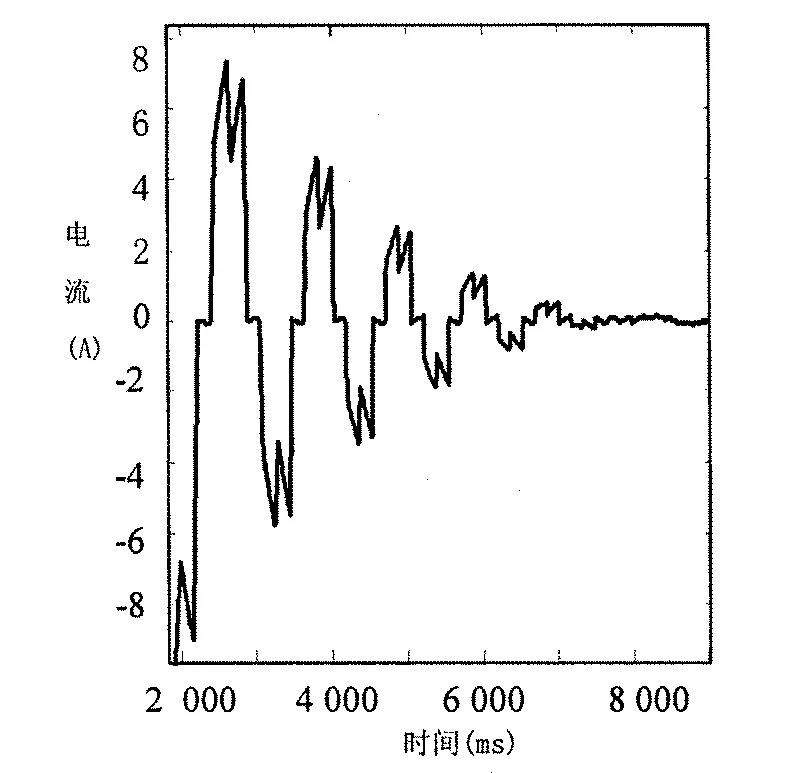
图10 优化后成功启动时的电流变化图
4 结论语
实验结果表明,优化后的端电压法与以前相比能够跟准确的检测到反电势过零点,根据仿真曲线起动的成功率有所提高,同时系统的稳定性也有所改善。由于这些方法都是在软件上实现,大大减少了硬件的结构,降低了开发成本,从而更有利于左心室辅助装置的移植。
[1] 曾培,茹伟民,袁海宇,等.人工心脏血泵驱动电机的控制研究[J].中国生物医学工程学报,2001,20(4):342-345.
[2] 曾建安,曾岳南,暨绵浩.MOSFET和IGBT驱动器IR2136及其在电机控制中的应用[J],电机技术,2005,1(2):13-15.
[3] 邹继斌,张豫.无位置传感器无刷直流电机驱动电路的研究[J].微特电机,1999,32(2):16-18.
[4] 沈建新,罗佳,陈永校.无传感器无刷直流电机位置误差的分析与补偿[J].微特电机,1999,27(5):5-13.
[5] 卢航远,薛凌云,严志火昆.一种新的无位置传感器无刷直流电机起动方法[J].中国水运,2008,12(1):39-41.