光伏太阳能硅片自动对准方法的探索
2010-03-23刘玉倩靳卫国王慧
张 文,刘玉倩,靳卫国,王慧
(中国电子科技集团第四十五研究所,北京 101601)
全自动太阳能印刷系统(下称:印刷系统)是一种使用直线电机驱动,对太阳能硅片进行全自动的上料、对准、印刷、烘干、下料的印刷系统,能够在满足工艺要求的前提下,进行精确、高效的光伏太阳能电池片制作。
在自动印刷硅片的过程中,需要对位于工作台不同位置的硅片进行定位并自动调整网框的位置,以保证硅片印刷精度的要求。硅片的对准精度要求是100μm,即硅片中心与印刷图形中心的距离不超过100μm,印刷线上预对准工位可以达到1mm的精度,因此需要设计一套光学系统来满足剩余的精度要求。
1 硅片自动对准原理
印刷系统自动对准原理为:建立一个空间二维坐标系并确定相机在坐标系中的位置坐标,通过将定位点在相机的位置换算成空间坐标值,得到硅片中心与印刷图形中心的坐标差,并将差值换算成校正电机的运动值,通过校正电机的运动,完成自动对准过程。
印刷系统设计了一台1394数字相机(1#)来检测硅片位置,使用两台模拟相机(3#、4#)来检测丝网位置,并以丝网中心为原点建立了一个二维坐标系以确定对准的各个要素的相对位置,如图1所示,由于自动印刷线上所用的工作台是一个旋转机构,因此,需要对硅片坐标进行转换才能供网框调整电机使用。
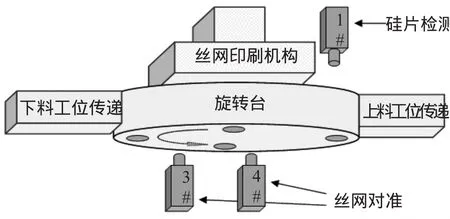
图1 自动对准结构
1.1 坐标系建立
由于所有的坐标值最终都需要转换成为校正电机的运动值,以电机运动方向作为坐标轴可以最大程度的减小坐标转换产生的误差。
因此,以x向校准电机正向为坐标系x轴正向,以y向校准电机正向为坐标系y轴正向,以标准网框中心点为坐标系原点,建立一个自动调整坐标系。
1.2 相机空间位置的确定
将标准网框安装在印刷机构上,并将校正电机回零,根据标准网框上标志点的坐标值((-12000,0)、(12000,0)),及其在相机中的位置,换算出丝网检测相机(3#、4#)在坐标系中的位置,通过检测标准网框图形在工作台上的映像,换算出硅片检测相机(1#)在坐标系中的位置。如图2。
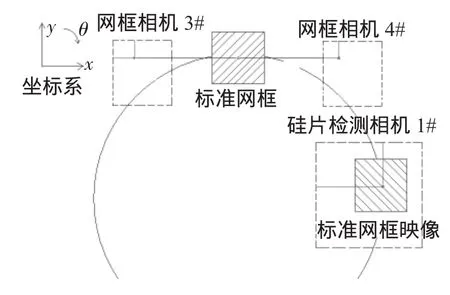
图2 相机校准原理
1.3 硅片及印刷网框坐标的确定
根据丝网检测相机在坐标系中的坐标,及印刷网框标志点在相机中的位置,得到印刷网框左右标志点的坐标,并换算出网框图形中心坐标,同理,根据硅片检测相机在坐标系中的坐标,及硅片在相机中的位置,换算出硅片中心坐标。
由于标准网框及标准网框映像在转动90°后是完全重合的,因此可以分别计算印刷网框和标准网框中心坐标差、角度差及硅片和标准网框映像中心坐标差、角度差,将二者相加,来得到校准电机运动的绝对值。如图3所示。

图3 硅片对准
2 计算公式
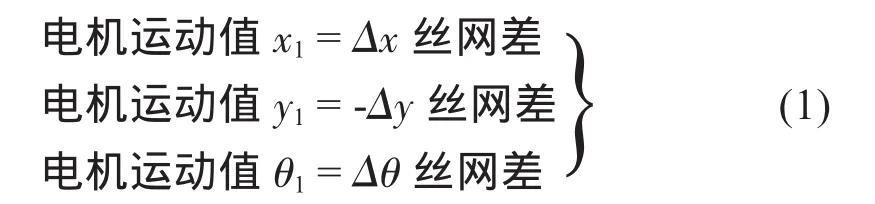
对准原理的各要素坐标表示如图3所示,根据对准原理,可以得到校准电机运动值的计算公式为:
(1)丝网相对位置计算:
Δx丝网差=[(x标准丝网左侧-x印刷丝网左侧)+(x标准丝网右侧-x印刷丝网右侧)]/2
Δy丝网差=[(y标准丝网左侧-y印刷丝网左侧)+(y标准丝网右侧-y印刷丝网右侧)]/2
θ印刷丝网=arcsin[(y印刷丝网右侧-y印刷丝网左侧)/网间距]
θ标准丝网=arcsin[(y标准丝网右侧-y标准丝网左侧)/网间距]
Δθ丝网差=(θ标准丝网-θ印刷丝网)
(2)硅片相对位置计算:
Δx硅片差=x硅片-x标准网框映像
Δy硅片差=y硅片-y标准网框映像
Δθ硅片差=θ硅片-θ标准网框映像
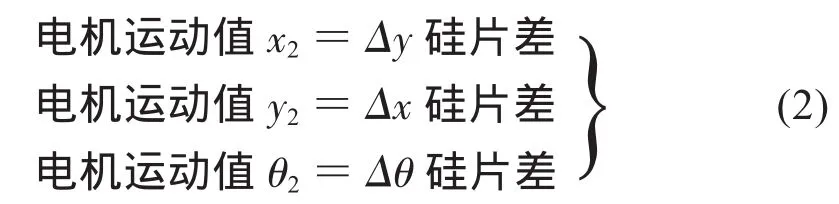
(3)电机运行绝对值计算:

3 误差分析
这种自动调整机构的定位误差主要是由相机安装的偏差产生的,主要有三个方面。
3.1 网框相机角度安装误差
在网框相机安装过程中,无法保证网框相机安装方向与电机运动方向绝对平行,使用网框相机定位值进行计算时会产生偏差,如图4所示。
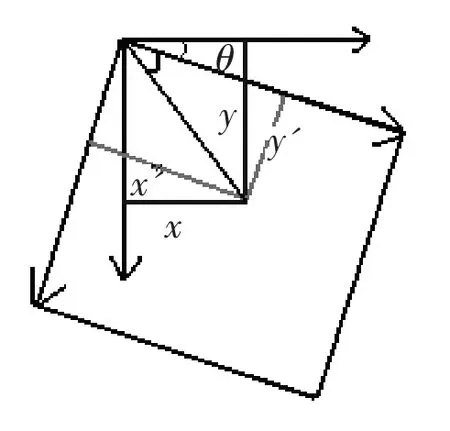
图4 相机角度误差校正
网框相机与调整电机之间的角度可以通过电机运动测量出来,将网框相机的定位值加上角度补偿,可以消除这种误差对定位带来的影响。
补偿计算公式为:

3.2 网框相机x向安装误差
网框相机x向安装误差是指在3#、4#网框相机中心连线与x向校正电机 (坐标系x向)不平行。
由计算丝网相对位置公式1可知,在计算丝网的位置偏移时,印刷网框与标准网框坐标中所包含的网框相机x向安装误差相互抵消,网框相机x向安装误差对网框位置偏移的计算无影响。
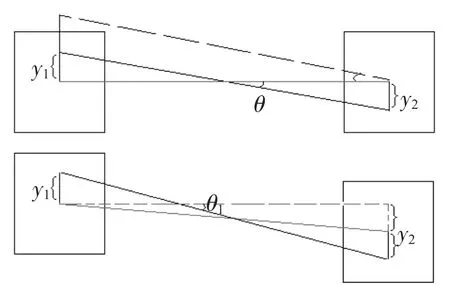
图5 相机安装误差校正
在自动对准计算中,假设两个丝网相机中心连线与x向校正电机(坐标系x向)的夹角为0,即相机在y向安装无误差,在计算网框旋转角度时,公式如下:
θ=arcsin((y2-y1)/网间距)
当两个丝网相机在y向安装有误差时,正确的计算值为:
θ1=arcsin((y2+相机水平误差-y1)/网间距)
在计算两个网框之间的角度差时:
Δθ=arcsin((y2+相机水平误差-y1)/网间距)-asin((y2'+相机水平误差-y1')/网间距)相机X向安装误差不会超出相机视场范围,因此角度误差最大范围为:
arctan(10/240)=2.39°,而θ值在±2.5°变化时,arcsin(θ)≈θ;
因此:Δθ=(y2+相机水平误差-y1)/网间距-((y2’+相机水平误差-y1')/网间距)
=(y2-y1)/网间距-((y2'-y1')/网间距)
=arcsin((y2-y1)/网间距)-arcsin((y2'-y1')/网间距)
有上述计算可知,在相机的视场范围内,印刷网框与标准网框角度差内所包含的网框相机x向安装误差可以相互抵消,网框相机x向安装误差对网框位置偏移的影响可以忽略。
3.3 硅片检测相机角度安装误差
在硅片检测相机安装过程中,无法保证硅片检测相机安装方向与电机运动方向绝对平行,使用硅片检测相机定位值进行计算时会产生偏差。
由于无法准确测定硅片检测相机角度安装误差值,只能计算出在精度允许的前提下,硅片检测相机的安装角度范围,由于预对准可以保证1mm的精度范围,因此,为保证100μm的精度,硅片检测相机的安装角度最大允许误差为:Δθ=arccos[(1000-100)/1000]=25.8°。机械安装精度就可以满足其误差要求。
3 结论
太阳能电池印刷产业是一个讲究效率的产业,通过对本文所讲述的对准算法的研究与分析,证明其是一种简单、易行,可能产生的潜在误差因素较小的算法,并且对已知的的误差有较好的补偿方案,可以完全满足全自动太阳能印刷系统对工艺及效率的要求,是一种较好的对准算法。
[1]于静.太阳能发电综述[J].世界科技研究与发展,2009,30(1):15-18.
[2]鲁华永.太阳能印刷技术探讨[J].江苏电机工程,2009,2(1):17-20.
