光纤捷联航姿系统在“动中通”的应用
2010-03-13董蓉霞
董蓉霞
(中国电子科技集团公司第39研究所陕西西安710065)
车载“动中通”通信系统的应用极为广泛,从行驶在戈壁搓板路面的“神舟”系列搜救车,到行驶在高楼林立的城市公路的公安系统通信车,再到不可知环境的应急系统通信车,林林总总。“动中通”通信系统工作的前提是通信天线要在载车行驶条件下精确对准卫星,而载车的机动性和路面的复杂性增加了其难度,一方面要求天线响应快,在桥梁、树木、建筑物、山体和隧道等遮挡后迅速完成对卫星目标的重捕,另一方面在载体剧烈扰动时能精确地自动跟踪卫星目标[1]。本文通过高精度单脉冲自跟踪系统和光纤捷联航姿系统在天线控制系统中的联合使用,使这一要求得以实现。
1 天线控制系统设计
高精度的“动中通”天线控制系统一般采用的工作方式为伪单脉冲单通道[2]的自动跟踪模式。所谓单脉冲就是在一个脉冲上可得到完整的目标偏离天线电轴的误差信息,因此响应快;伪单脉冲自跟踪也为零值跟踪,工作在和信号的最大点,差信号的零点,该处差斜率最大[3],所以跟踪精度高,抗颠簸、冲击、振动能力强。“动中通”天线的半功率波束宽度较窄,动态条件下没有航姿系统的引导,自身捕获卫星目标的时效性较差。
光纤捷联航姿系统是一种把光纤陀螺和加速度计直接连接在动载体上测量载体的角加速度分量和角速度分量,航姿处理器根据车体坐标系和导航坐标系的方向余弦阵,计算出沿导航坐标系3个轴上的加速度分量,进而计算出载体的航向和姿态信息[4]。光纤捷联航姿系统是一种辅助式惯性系统,成本低可靠性高[5],它不具备自对准功能,利用单脉冲跟踪系统对卫星目标高精度跟踪的角度数据,实时标定光纤捷联航姿系统初值,可以使航姿系统长期保持在高精度的惯性导航水平上。天线控制系统在进行卫星目标捕获时,工作方式为航姿系统引导天线指向卫星目标[6],目标进入天线电轴的半功率波束宽度内,天线控制系统自动转换到单脉冲自动跟踪模式,完成天线对卫星目标的捕获任务而进入高精度自动跟踪状态。高精度单脉冲自跟踪系统和光纤捷联航姿系统在天线控制系统中的联合使用,使“动中通”通信系统天线控制系统设备同时具备快速捕星和精确跟踪的能力。
“动中通”通信系统天线控制系统框图如图1所示。

图1 某车载“动中通”天线控制系统框图
当单脉冲自跟踪支路故障时,作为一种冗余手段,天线控制单元利用捷联航姿系统送出的天线车体角度作为引导命令引导天线,在航姿收敛时间范围内引导跟踪目标。
2 试验与数据处理
为了检查天线对卫星目标的捕获能力,测试单脉冲自跟踪性能和捷联航姿系统的各项性能,在某工程“动中通”通信系统天线控制设备中进行了专项试验,试验内容包括在建筑工地、沙石路面、复杂城市环境和山区公路上的颠簸跟踪性能试验和动态再捕星试验。
2.1 再捕获试验
载车在山区公路以30~80 km/h的时速运行,天线跟踪东经87.5°的中卫1号同步卫星,在连续穿越5个涵洞时,天线控制单元记录天线工作状态和天线运动数据。通过图谱绘制以及所记录的角度和时间数据分析,检验天线的再捕获能力。
数据记录曲线如图2所示,细线条记录的是捷联航姿系统在涵洞里引导天线指向卫星目标的数据,粗线条记录的是天线载车在出涵洞后,单脉冲自跟踪系统控制天线跟踪卫星目标的数据,二者对天线控制趋势一致,衔接过渡平滑,载车在出涵洞时天线对卫星目标的信标信号频率和相位的锁定时间不大于2 s。
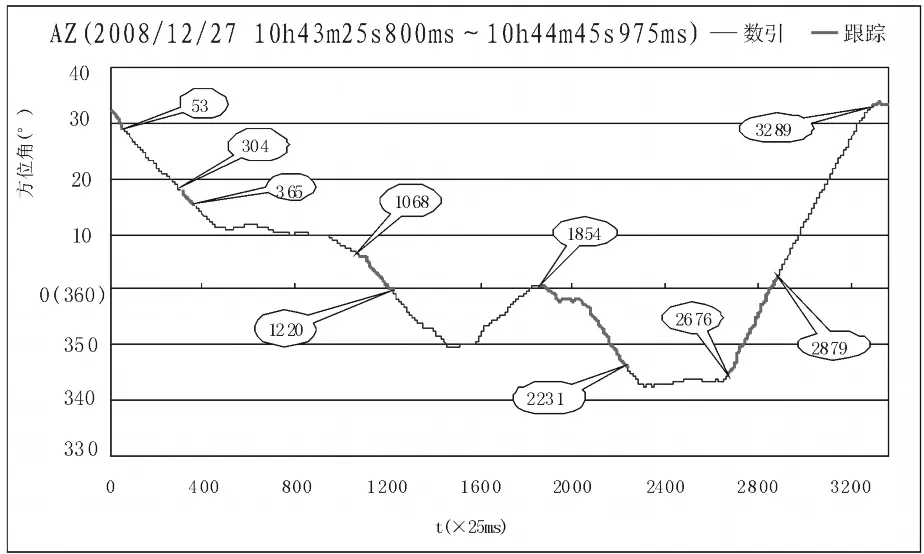
图2 山区公路上天线跟踪状态数据曲线
2.2 抗扰动能力试验
载车在开阔不遮挡、无路面、车辆可极限通过的建筑工地复杂地形条件下以5~35 km/h的时速连续运行,天线跟踪东经103°的烽火1号02星,以单脉冲自跟踪方式对目标进行跟踪,同时记录天线跟踪接收机跟踪卫星信标角偏差信号、天线控制单元工作状态和天线运动数据,通过图谱绘制,分析出载车在颠簸路面行驶时天线动态跟踪的能力。数据记录结果如图3和图4所示。

图3 颠簸路面单脉冲自跟踪方位角运动曲线

图4 颠簸路面单脉冲自跟踪俯仰角运动曲线
由图3和图4可知,载车在颠簸路面分别以顺时针方向和逆时针方向行驶,在记录数据将近1 min的时段里,天线没有丢失目标,始终处于单脉冲自跟踪状态,载车运动引起天线方位角运动速度达到123.33(°)/s时,俯仰角运动速度达到48(°)/s时,天线能够正常跟踪卫星信标。
3 结束语
通过对某车载“动中通”通信系统天线控制分系统的多项试验分析,表明捷联航姿系统与单脉冲自跟踪系统结合使用,有效解决了“动中通”设备要求天线控制分系统对卫星目标捕获快速和跟踪精确。该方法的性价比较高,实用可靠。
[1]阮晓刚,汪宏武.“动中通”卫星天线技术及产品的应用[J].卫星与网络,2006(3):34-37.
[2]沈民谊,蔡镇远.卫星通讯天线.馈源.跟踪系统[M].北京:人民邮电出版社,1993:234-237.
[3]马宁.“动中通”常用跟踪方式[J].测控与通信,2008,32(120):43-46.
[4]唐大全,刘锦涛,张博.微型捷联姿态系统的硬件设计[J].自动化仪表,2007,28(1):15-18.
[5]秦永元.惯性导航[M].北京:科学出版社,2006:328-330.
[6]AL-7204-Product-Sheet[EB/OL].2008.http://www.orbit-cs.com/uploads/Files/AL-7204.pdf.
