无人机发动机缸温自动控制机构设计
2010-03-13刘长亮王宏新殷少锋鲍传美
刘长亮,王宏新,殷少锋,鲍传美,包 化
(1.武汉军械士官学校 无 人机系机电教研室, 湖北 武 汉430075;2.中国人民解放军71521部队65分队,河南 新 乡 4 53800)
无人机发动机在飞行过程中的工作状态主要通过监测缸温进行判断,因此,气缸温度对于无人机主站操作人员是非常敏感的参数,因为发动机是无人机的心脏,是无人机系统机械设备中故障率最高、调整最复杂、维护工作量最大的系统,其工作状态的好坏将直接影响无人机的安全飞行[1]。气缸温度的调控是一项极为关键的任务,目前我军多种无人机的发动机气缸温度控制都是人工实施的,主要依靠主控站内操作员人工进行监测缸温,当超出规定范围时将其打开,反之过低时则将其关闭[2]。这种需要人工实时干预的方法不可避免地加大了系统操作的复杂度,导致可靠性降低,严重威胁无人机系统的安全性能。
1 气缸温度自动控制的难点
无人机发动机的缸温难控制的关键在于其变化的复杂特性,不能通过一个特定的气道开度控制模式进行控制。现有的无人机系统大多都在主控站内设有一个专门按键以控制气道的开闭,进而调整缸温,由于该缸温线性变化,因此只能完全凭经验来实施。该发动机缸温具体有以下特点:
1)影响因素复杂影响发动机缸温的因素很多,如无人机飞行速度、无人机周遭气体环境、无人机飞行高度、发动机的工作状况等[3]。这使得简单控制系统对有效控制缸温无法起到显著作用。
2)大时滞非线性变化无人机发动机的缸温与气道开度的关系并非是一个简单随动,而是一个具有大时滞、非线性的过程,如图1所示。
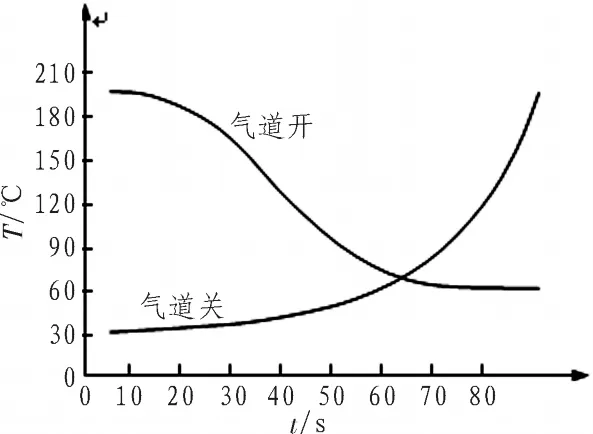
图1 缸温随气道开闭的变化
从图1中可以看出,无人机发动机缸温的控制过程可大致分为两种情形:第一种是气道开,这是当发动机汽缸温度过高时采取调控的一种措施。在这种操作下,气道全开,冷空气全速流经发动机散热片,温度在支撑一段时间后开始缓慢并加速下降,最终稳定。第二种是气道关,这是当发动机汽缸温度过低的时候采取的措施,这种操作使得气道关闭,从而使得流经发动机散热片的冷空气中断,温度从开始缓慢回升,但是在后半段会有所加速。
2 基于模糊控制的自动控制系统设计
模糊控制不需要掌握被控对象的数学模型,特别适合于上述分析的非线性控制。它对过程参数的变化具有较强的适应性,并且可加入一些人为的经验因素,使控制过程更易于按照人为的要求实现[4]。这种气缸温度模糊控制器的工作原理是设计一张控制策略表存入单片机的ROM中,控制时根据对温度的采样结果计算输入量的值,然后通过量化因子将其模糊化以得到其论域,再查表得到相应的控制量[5]。将该控制量与比例因子相乘即可作为输出量对气道开度实施控制。
2.1 输入和输出量的确定
模糊控制器输入量的选择对系统性能的影响很大,在这个课题中,汽缸温度、发动机转速以及散热片温度都可作为输入量,但是这些方法工程上实现难度大且效果差[6]。根据采样的方便性与计算的精确性,将缸温传感器的输出变化率ΔT/Δt作为模糊控制的输入量便可实现较完美的控制。输出量则是PWM波的占空比增量Δton经数模转换后的控制电压信号。
2.2 语言变量、论域及隶属度的确定
取(-3,-2,-1,0,+1,+2,+3)作为论域,输入量ΔE的基本论域为[-5,5],量化因子即为

相应的,由实验得出ΔT/Δt的最大值为2.513 0×10-2V/S,量化因子即为

输出为控制电压信号,其论域段的划分方法同上,用U表示输出控制量,则比例因子确定为

对于论域(-3,-2,-1,0,+1,+2,+3),定义7个语言变量值:NB(负大)、NM(负中)、NS(负小)、O(零)、PS(正小)、PM(正中)和PB(正大),采用正态函数模型构造隶属函数[7]。其中,参数a取适当值使集合{-3,-2,-1,0,+1,+2,+3}映射到集合{NB,NM,NS,O,PS,PM,PB},参数b决定隶属函数的形状,可根据系统误差加以调整以得到合适的控制灵敏度和稳定性。
2.3 模糊控制策略表的建立
根据上述分析,不同情况下,缸温控制的方式也是不一样的,如果只将ΔE作为主要判别标准,必然会给控制结果带来比较大的偏差。基于此认识,可以采用增加ΔU/Δt权值的途径加以改善。其解析式为:

式中,α∈[0,1]称为修正因子,< >表示四舍五入取整,E 和EC是 Δ E与 Δ U/Δt的模糊量化。
考虑到控制差异性,适当增加权值,令α=0.6,经过上式运算,再经过最大隶属度判决可得到模糊控制表,如表1所示。
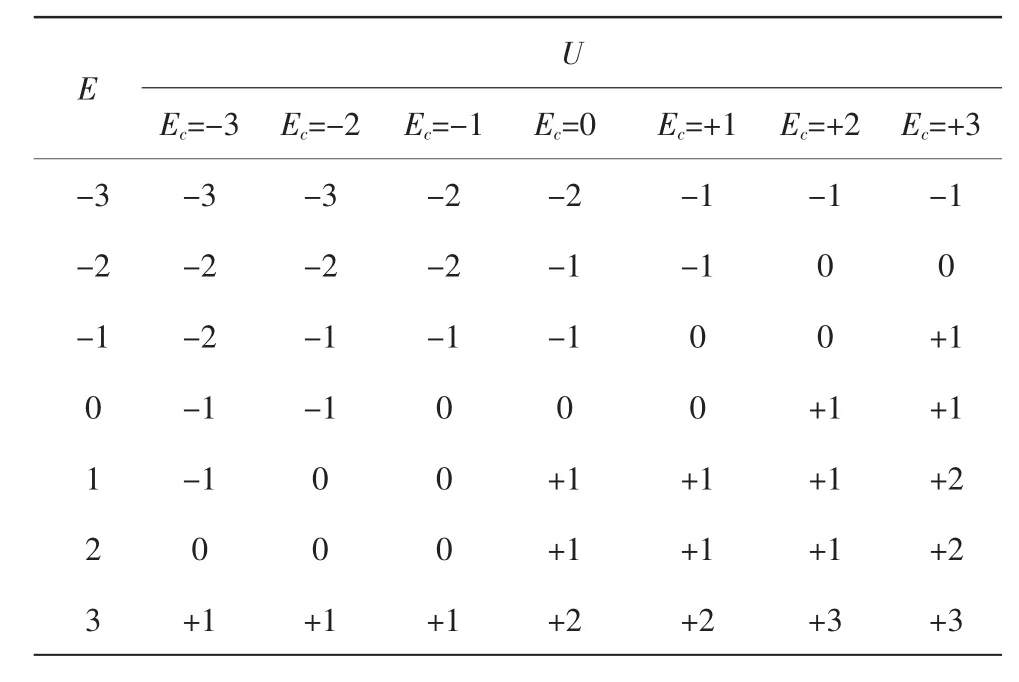
表1 模糊控制表
表1中0表示维持现在的控制电压,+1表示控制电压信号增加一个等级,-1表示控制电压信号减小一个等级,依次类推根据得出的电压等级乘以比例因子Ku,即得到输出的控制电压变化值。将此变化值加到前一时刻的电压值上就是此次应输出的控制电压信号。例如,当输入量E为2,而此时变化率EC为-1时,输出电压应该为0.6×2+(1-0.6)×(-1)≌1。
3 软件部分设计
为了达到自动控制的目的,本系统软件部分直接写入微处理机ROM,其设计流程如图2所示。
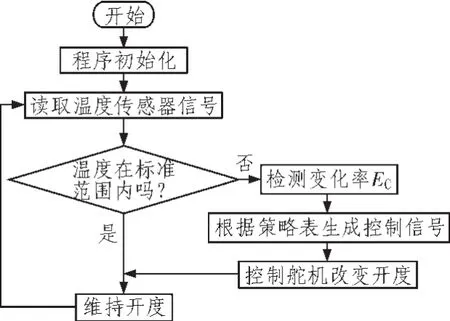
图2 软件设计流程
4 硬件组成与实现
模糊控制器要完成输入信号(给定信号和反馈信号的偏差和偏差的变化率)的模糊化,根据模糊知识库进行模糊推理和模糊判决(解模糊),得到精确控制的变量[8]。但是由于本文系统采用了在ROM中预存模糊控制表的方法,将在线推理运算转变成了查表运算,大大提高了系统的响应速度。具体结构如图3所示。
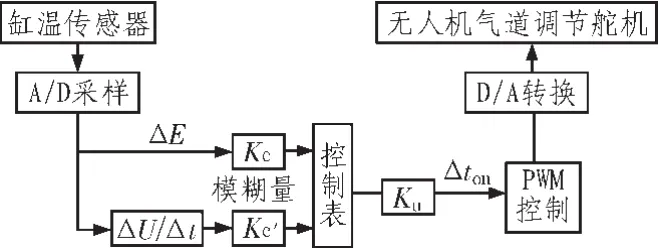
图3 系统的组成框图
4.1 微处理机模块
图3中模糊化、模糊决策以及解模糊环节都是在微处理机模块中完成的,这里选用单片机MC68HC05SR3,其内部资源丰富,有较大的ROM和RAM空间,便于实施模糊控制。另外,该器件还带有4个A/D转换器,便于检测模拟量。该单片机与相应的接口电路配合构成系统的控制核心。
4.2 温度采样电路
一般情况是通过A/D转换器对4个缸温传感器的感测模拟信号值进行采样,然后送入微处理机模块作为控制的依据,如果温度变化产生偏差则控制电压产生相应的变化从而形成实时的控制。本文所采用的MC68HC05SR3单片机本身就具备A/D转换功能,其引脚PD0~PD3可直接接入模拟信号,其具体硬件电路如图4所示。

图4 系统硬件电路图
4.3 控制电压输出电路
首先,微处理机模块通过PWM脉宽调制方式把计算出的控制电压变化量以数字方式输出,然后经D/A转换模块转变为舵机可用的控制电压变化量,将此变化量加到舵机的控制电路中一起输出便得到所需的控制电压信号。D/A转换模块选用TLC5615,因其最大输出电压是基准电压值的两倍且带有上电复位功能,具有较高的性价比。
4.4 电源供应模块
本系统从实际出发,严格按照系统需求进行设计,充分利用现有的电源供应系统,采用7805三端集成稳压模块实现了电压转换。由于无人机机载稳压电源提供的电压达10 V以上,且极性复杂,不能直接送给单片机使用,必须进行电压处理。TA7805型三端集成稳压模块由于其所需外围元件少,并具有过流、过热及调整管保护电路,可靠方便及价格便宜,适合本系统应用。将其接入驱动舵机工作的汇流条取电,即可方便的变换出微处理机及其他器件所需的+5 V电压。
5 结论
通过对无人机发动机汽缸温度的监测得到了模糊控制所依据的电压变化量,以此变化量为输入设计了模糊控制策略表并实现了智能跟踪模糊控制。实验证明,在该机构的控制下,发动机气缸温度较平稳地保持在了额定工作状态下的水平,保证了发动机的正常工作。通过与传统一开一闭的气道控制方式对比,这种基于模糊控制的无人机发动机气道开度自适应机构具有以下优点:自主控制,反应速度和可靠性大大增加;非线性控制平滑流畅;温度变化和缓。由此可见,采用该技术实现了无人机发动机汽缸温度控制过程的自动化和智能化,对无人机武器系统作战能力的提高具有重大意义。
[1]张加圣,应英,应勇.航空发动机故障监控系统的设计与软件实现[J].测控技术,2007(6):65-68.
[2]王宏新,刘长亮.无人机机电设备构造与维修[M].武汉:武汉军械士官学校,2007.
[3]赵俊,陈建军,王灵刚,等.航空发动机的智能神经网络自适应控制研究[J].航空动力学报,2008,23(10):1913-1920.
[4]章卫国,杨向忠.模糊控制理论与应用[M].西安:西北工业大学出版社,2004.
[5]许钊.查表式模糊控制器优化策略研究[J].中国电力教育,2008(Z2):83-85.
[6]高翔,殷业飞.无人机发动机的自动化智能测试系统[J].弹箭与制导学报,2005,25(4):446-449.
[7]程武山.智能控制理论与应用[M].上海:上海交通大学出版社,2006.
[8]孙增圻.智能控制理论与技术[M].北京:清华大学出版社,2004.