一种基于最小熵准则的新的自聚焦优化算法
2010-02-21高许岗苏卫民顾红
高许岗,苏卫民,顾红
(南京理工大学 电子工程与光电技术学院,江苏 南京210094)
0 引言
对于高分辨率机载合成孔径雷达(Synthetic Aperture Radar,SAR)成像需要雷达平台的精确运动信息,由于载机受气流等因素影响,致使飞行姿态不稳定,载机的飞行轨迹往往偏离理想状态。即使通过载机的导航系统的补偿仍有较大的相位误差,为了得到高质量的雷达图像,需要基于回波数据的相位误差补偿,即自聚焦。目前常用的图像偏置法[1-2](map drift,MD)和相位梯度自聚焦算法[3-5](phase gradient autofocus,PGA)都要求场景中有强散射点,且后者应用于条带模式SAR 时,还需要对回波数据做一些处理并对算法做一些修改。文献[6]提出的图像最小熵方法不需要像PGA 算法那样从图像域中选取强点目标,适合于任何场景。但文献[6 -7]中利用最小熵方法估计多普勒调频率时需要在设置的多普勒调频率区间搜索最优多普勒调频率,这一过程需要对每一个搜索点都要对方位向进行压缩处理后计算雷达图像的熵值,运算量很大,不能满足实际工程应用。文献[8]给出一种对最小熵方法的改进,即按照聚焦深度对距离压缩后的数据矩阵进行距离向分块处理,但总体上计算量并没有降低很多,仍不能较好的满足实际应用的需要。
本文从降低最小熵准则估计多普勒调频率的运算量出发,根据多普勒调频率与图像熵的关系,首先确定多普勒调频率偏差方向,然后用二分法快速逼近图像熵最小值对应的多普勒调频率,获得最优的多普勒调频率。此外分析了在相同估计精度下,与原始方法相比,本文提出的方法明显降低了运算量。最后通过实测数据处理验证该方法的有效性。
根据PDCA循环中所包含的基本内容,对患者展开问卷调查,使其对相关护理人员的工作进行满意度的评价,对相关护理人员的得分进行统计。
1 最小熵估计多普勒调频率
雷达数据经过距离压缩再经过方位压缩就可以得到雷达图像。由于雷达平台等因素造成方位向的多普勒调频率偏差将引起主瓣展宽、主瓣电平降低、旁瓣电平增加而使压缩后的图像散焦。而准确的多普勒调频率使频谱的能量高度集中,主瓣很窄,图像聚焦好,图像质量高。文献[6]引入信息熵来衡量方位压缩后图像的聚焦程度。
要切实提升对纪检监察工作的认识。从工作实践来看,认识上的误区主要有两种:一种认为纪委的监督阻碍了工作效率的提升,片面地把监督与发展对立起来,因而存在应付监督、不愿监督的现象,甚至表现为一定形式或程度的抵触情绪,不利于监督工作的正常化、规范化、常态化;另一种是把纪委的监督当“挡箭牌”,有的部门自己不履行检查与监督职能,而是把纪委推到一线,甚至事事都要有纪检部门人员参加,并为其决策“签字背书”,这种“越位”“错位”现象把纪检部门推向了“监督不是、不监督也不是”的两难境地。
对于M×N 的雷达图像为{x(m,n)},其中m为方位向单元标号,n 为距离向单元号。定义图像的熵为
首先利用运动传感器提供的参数计算出的多普勒调频率ka0作为初始值,设置一个多普勒调频率区间,假设为[ka0+a ×ka0,ka0-a ×ka0],其中,a大于0 且小于1.然后对经过距离压缩后的雷达数据分别利用ka0、ka0+a ×ka0和ka0-a ×ka0产生方位向参考函数,进行方位向压缩处理获得雷达图像,并计算出对应的熵值分别为E0、E1和E2,接着判断E1和E2的大小,如果E1>E2,则多普勒调频率偏差在[ka0,ka0-a×ka0];否则多普勒调频率偏差在[ka0+a×ka0,ka0].

其中,图像的散射强度密度

1)计算搜索区间[ak,bk]的中点

假设经过k-1 次迭代处理后,第k 次迭代时的搜索区间为[ak,bk],取搜索区间的2 个端点ak和bk分别产生方位向参考函数进行方位向压缩处理获得雷达图像,并计算对应的熵分别为E(ak)和E(bk),依据以下条件确定新的搜索区间:
2 二分法
2)如果E(ak)≥E(bk),则令
2.1 二分法的基本步骤
按全回归分析方法,自变量M=135,样本量N=50,此回归模型无法求解。由于有的自变量——结构特征参数对其响应参数不显著,特别是分子描述符参数之间普遍存在共线性关系,所以结构特征参数的提取、筛选是构效关系研究的关键。应用数据处理方法,本例经筛选进入模型的自变量m=9,大大简化了模型。本例M=135,选用最简单的多元线性回归,可能构成的模型有2M-1=2135-1;如果选用二次多项式回归,仅考虑一次项和二次项,可能构成模型有(22M-1)个。采用穷举法时计算工作难以操作,由此研究产生若干变量筛选算法。
如果多普勒调频率偏差越小,则图像聚焦深度越高,熵也越小。当多普勒调频率不存在误差时,图像的熵值达到最小值。目前,利用最小熵准则需要在设置的多普勒调频率区间逐点进行搜索找到最优的多普勒调频率,这样的搜索运算量较大,且随着估计精度提高,运算量会随之增加。为了降低最小熵估计多普勒调频率的计算量,下面提出一种基于最小熵准则估计多普勒调频率的优化方法,该方法能快速搜索到最优的多普勒调频率。
像素的总功率为
由于图像熵与多普勒调频率具有这样的关系:利用真实的多普勒调频率产生的雷达图像,其熵值最小,偏离真实的多普勒调频率越大,雷达图像的熵值越大。基于这一关系,提出采用二分法来搜索最佳的多普勒调频率。二分法的基本思想是:每一次以相同的压缩率1/2 使搜索区间减半,直至搜索区间缩小到一定程度时,搜索区间中每一个元素对应的图像熵值均接近图像熵值的最小值。此时,搜索区间中各点都可以看做是最优的多普勒调频率的近似值。
当条件2)成立时,新的搜索区间为[ak+1,bk+1]=显然此时新的搜索区间的区间长度为上一次的搜索区间的区间长度的一半,且第k +1次迭代时,新的搜索区间的右端点bk+1=bk;当条件3)成立时,类同上面的讨论,新的搜索区间的左端点ak+1=ak.综上可知,每次迭代只需要再利用搜索区间的其中一个端点产生方位向参考函数,进行方位向压缩处理获得雷达图像,并计算对应的熵,同时搜索区间每次迭代后缩小为上一次迭代搜索区间的一半,直到搜索区间长度小于所要求的估计精度时,停止搜索,此时最小熵对应的多普勒调频率即为最优多普勒调频率。
3)如果E(ak)<E(bk),则令ak+1=ak,bk+1=
2.2 运算量分析
对经过距离向处理后同样的雷达数据矩阵,假设搜索的多普勒调频率区间为[ka0+a ×ka0,ka0-a×ka0]和估计精度为2 ×a×ka0/K.原始最小熵方法估计多普勒调频率需要将区间[ka0+a ×ka0,ka0-a×ka0]分成K 等分,执行K 次运算;而利用本文提出的方法,只需要执行3 +ceil(log2(K/2))(其中ceil 为对log2(K/2)为分数时取整加1,整数时不变)次相同的运算。不同的估计精度时两种方法的迭代次数如表1所示。
凭借模型开发商与企业的合作,长期使用模型供应商提供的信用评价模型,基本忽略了市场交易中瞬息万变的交易风险。长此以往,企业往来客户的信用信息记录长时间基本一致,根本无法正确反映客户的信用变更。企业在使用单一的客户信用评价方法的情况下,丧失对客户信用情况的精准掌控,无法正确预估企业面临的客户信用风险。
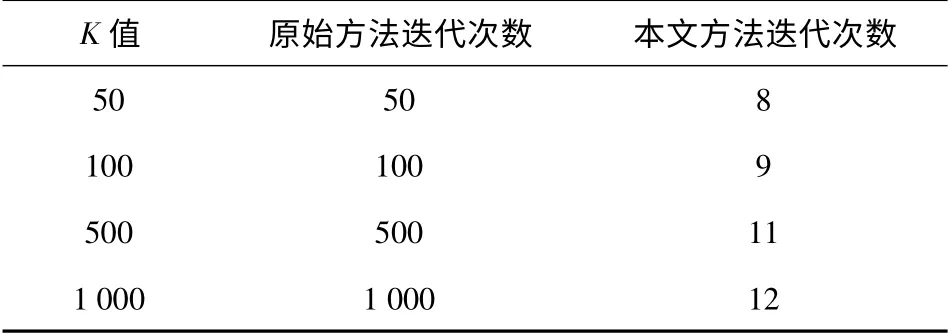
表1 原始方法和本文方法的迭代次数Tab.1 Iterations of original method and this method
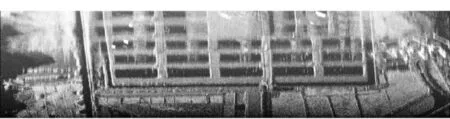
图1 原始图像Fig.1 Original image
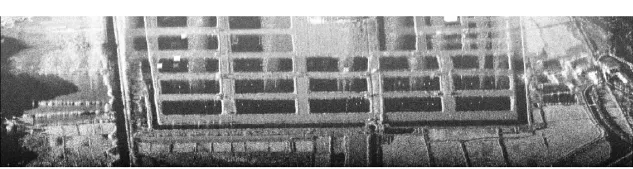
图2 原始最小熵方法处理结果Fig.2 Image by original minimum entropy criteria
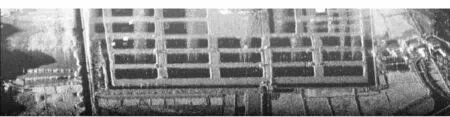
图3 本文的方法处理结果Fig.3 Image by minimum entropy criteria with optimization algorithm
3 实测数据处理和分析
本文利用某机载条带模式SAR 录取的实测数据,验证了本文的方法估计多普勒调频率的有效性。图1为利用距离-多普勒成像算法未进行自聚焦处理得到的图像,且图像大小为1 000 ×4 096(方位×距离)像素,分辨率为0.5 m ×0.5 m;图2为利用原始最小熵方法获得的图像;图3为利用本文的方法得到的图像。由图1和图3可知,自聚焦前的图像的方位向有散焦现象,利用本文的方法聚焦后,图像的质量有明显提高;由图2和图3可知,原始方法与本文的方法的图像质量的差别很难看出,但从运算量上来说,图3更符合实时成像的要求。此外,图1、图2和图3的熵分别为7.140 5,6.970 9 和6.970 7,由此可知,图2和图3熵小于图1的,说明利用最小熵方法获得的图像质量较好,同时也表明图2和图3的图像质量基本一样,进一步验证了本文方法的有效性。
青辰心生好奇,盯着那张隐在薄雾后的脸,努力想将他的面目看得清楚,却越看越是头晕,如何也辨认不清。他从未有过这样的体验,他的双眸拥有异乎常人的视力,能够将很远处的东西看得清晰,但眼前这人,他却无法看清。他看着看着,终觉心底一阵发慌发冷,急忙移开视线,不能直视。
4 结论
本文基于最小熵准则的基础上,利用多普勒调频率与图像熵的关系,提出了采用最优化中的二分法估计最优多普勒调频率,大幅度地降低了运算量。因此本文的方法使基于最小熵准则的自聚焦算法在SAR 实时成像处理中有很大的实用价值。通过实测数据处理,验证了本文算法的有效性。
References)
[1]皮亦鸣,杨建宇,付毓生,等.合成孔径雷达成像原理[M].成都:电子科技大学出版社,2007 :111 -114.PI Yi-ming,YANG Jian-yu,FU Xu-sheng,et al.Principle of synthetic aperture radar imaging [M].Chengdu:UEST Press,2007:111 -114.(in Chinese)
[2]Samczynski P,Kulpa K.Non iterative map-drift technique[C]∥2008 International Conference on Radar.Adelaide,SA,2008:76-81.
[3]谭衢霖,蒋金雄,李晓芳,等.基于相位梯度自动聚焦的机载雷达成像实验[J].上海交通大学学报,2008,42(2):299 -303.TAN Qu-lin,JIANG Jin-xiong,LI Xiao-fang,et al.Airborne LSAR imaging experiment based on phase gradient autofocus[J].Jounral of Shanghai Jiao Tong University,2008,42(2):299 -303.(in Chinese)
[4]Haoyang Tang,Haoshan Shi,Changyuan Qi.Study on improvement of phase gradient autofocus algorithm[C]∥2009 First International Workshop on Education Technology and Computer Science.Wuhan,2009:58 -61.
[5]Wahl D E,Eichel P H,Ghiglia D C,et al.Phase gradient autofocus:a robust tool for high resolution SAR phase correction[J].IEEE Trans on AES,1994,30(3):827 -835.
[6]武昕伟,朱兆达.一种基于最小熵准则的SAR 图像自聚焦算法[J].系统工程与电子技术,2003,25(7):867 -869.WU Xin-wei,ZHU Zhao-da.A novel autofocus algorithm based on minimum entropy criteria for SAR images[J].Systems Engineering and Electronics,2003,25(7):867 -869.(in Chinese)
[7]邢孟道,保铮.基于运动参数估计的SAR 成像[J].电子学报,2001,29(12A):1824 -1828.XING Meng-dao,BAO Zheng.Motion parameter estimation based SAR imaging[J].Acta Electronicasinica,2001,29(12A):1824-1828.(in Chinese)
[8]马仑,廖桂生,王欣.SAR 成像中一种改进的最小熵多普勒调频率估计算法[J].火控雷达技术,2005,34:21 -24.MA Lun,LIAO Gui-sheng,WANG Xin.An improved estimation algorithm of minimum entropy Doppler frequency modulation ratio in SAR images[J].Fire Control Radar Technology,2005,34:21-24.(in Chinese)
