多站无源定位系统中的机动目标跟踪算法
2010-01-26陈德煌
陈 玲,陈德煌
(空军第一航空学院航空电子工程系,河南信阳 464000)
多站无源定位系统中的机动目标跟踪算法
陈 玲,陈德煌
(空军第一航空学院航空电子工程系,河南信阳 464000)
针对多站测向无源定位系统提出了一种杂波环境下机动目标的被动跟踪算法——CMIMMPDF算法。该算法首先用转换测量的卡尔曼滤波(CMKF)替代了传统的扩展卡尔曼滤波,克服了后者精度不高易发散的缺点,并将其结合交互多模型(IMM)算法及概率数据关联(PDF)算法,有效地完成了多站无源定位系统对杂波环境下机动目标的跟踪。仿真结果证明了该算法的有效性。
无源定位系统;机动目标跟踪;转换测量卡尔曼滤波;交互多模型算法;概率数据关联算法
1 引 言
多站测向无源定位系统是通过高精度的测向设备在两个或两个以上的观测站对辐射源进行测向(方位角和俯仰角),然后根据各观测站测得的数据以及观测站之间的距离,经过几何运算,确定出辐射源的位置。
要利用多站测向无源定位系统对杂波环境下的机动目标进行跟踪,则要解决以下三方面的问题。首先,为解决目标运动状态不确定性问题,必须建立合理的目标运动模型,以保证它能够准确描述目标的运动规律且易于进行数学处理;为解决量测信息的不确定性,则必须采用优化的滤波算法,以获得高精度的滤波值;为了解决密集杂波造成的测量模糊,则需采用有效的数据关联算法,将目标从杂波中提取出来。本文将从以上三个方面解决多站测向无源定位系统对机动目标的跟踪问题。
由于多站测向无源定位系统对目标进行观测所获得的观测方程是非线性的,因此通常只能采用扩展卡尔曼滤波算法,但是扩展卡尔曼滤波算法的缺点是精度不高且易发散[1]。为了解决这个问题,本文用转换测量的卡尔曼滤波(CMKF)算法替代扩展卡尔曼滤波算法,为了建立合理的运动模型和解决杂波问题,将CMKF算法与交互多模型(IMM)算法、概率数据关联(PDF)算法相结合,即得到CM-IMMPDF算法。用CM-IMMPDF算法对杂波环境下的机动目标进行跟踪,跟踪效果与传统方法相比有很大改善,仿真结果验证了该算法的有效性。
2 转换测量的卡尔曼滤波算法
假设无源测向定位系统由S1(x1,y1,z1)、S2(x2,y2,z2)两个观测站组成,利用它们对辐射源T(x,y,z)进行定位。其中,S1站测得目标的方位角和俯仰角分别为1和ε1,S2站测得目标的方位角和俯仰角分别为2和ε2,利用这些测量数据可实现对目标的定位。
定位方程可表示如下:
由式(3)可计算出t=1和t=2时刻的目标位置,从而得到起始目标航迹。
在无源测向定位系统中,由于系统获得的测量信息为角度信息(方位角和俯仰角),由式(1)不难看出角度信息所对应的观测方程是非线性的,所以通常滤波时要采用扩展卡尔曼滤波算法。但是,扩展卡尔曼滤波具有精度不高且易发散的缺点,为了克服这一缺点,我们采用转换测量的卡尔曼滤波算法替代扩展卡尔曼滤波算法。转换测量的卡尔曼滤波算法实际上就是通过目标位置解算方程(1)将角度观测信息(1,ε1,2,ε2)T转换成目标位置信息(x,y,z)T,从而使观测方程线性化。转换测量的卡尔曼滤波算法的状态方程和观测方程可分别表示为
计算出观测协方差阵之后,就不难写出转换测量的卡尔曼滤波方程式,其形式与标准卡尔曼滤波方程[1]一致,故此处不再列出。下面将详细介绍CM-IMMPDF算法的步骤。
3 CM-IMMPDF算法
对于机动较复杂的目标而言,用任何一种运动模型都无法准确描述其运动规律。交互多模型(IMM)算法[2,3]则巧妙地将有限多的目标运动模型结合在一起,共同描述目标的运动规律。该算法的特点是不需要机动检测,而且具有全面自适应跟踪能力。概率数据关联(PDF)算法[4-6]是Bar-shalom和Tse在1975年提出的,它主要用于解决杂波环境下单目标的跟踪问题。将IMM算法与PDF算法相结合,即IMMPDF算法可有效解决杂波环境下机动目标的跟踪问题。
本文将IMMPDF与转换测量的卡尔曼滤波算法有机结合,有效解决了多站无源定位系统中杂波环境下的机动目标跟踪问题。
设目标运动规律是由多个运动模型组成的混合
式中,CM为与量测矢量维数M有关的常数,G为波门的大小。
(4)概率数据互联滤波(PDAF)
所有落入波门内的有效回波都将送入各子滤波器分别进行概率数据互联滤波(PDAF),滤波后输出

对于CM-IMMPDF算法来说,并不是所选取的目标运动模型越多越好,目标模型选得过多反而会增加计算量,降低跟踪性能。通常最好选取2~3种尽可能准确地描述目标运动规律的目标运动模型。
4 仿真结果
仿真条件:两观测站的位置坐标分别为:(-20 km,0,0),(20 km,0,0);采样时间间隔为1 s;方位角和俯仰角的观测误差均为5 mrad。目标的初始位置为:(-100 km,50 km,10 km)。
运动轨迹分以下3个阶段:
运动阶段1:匀速直线运动,各方向分速度为:Vx=0.2 km/s,Vy=0 km/s,V z=0;运行时间为150 s;
运动阶段 2:匀速圆周运动,角速度为0.157 rard/s,向心加速度为74 m/s2,线速度为471 m/s,圆半径为3 km,运行时间为20 s;
运动阶段3:匀速直线运动,各方向分速度为:Vx=-0.2 km/s,Vy=0 km/s,V z=0;运行时间为130 s。
检测概率PD为0.9,观测落入相关门的概率PG为0.98,相关门G=16,杂波密度 β分别取0.006 25/m r2和0.016/m r2。
在相同的仿真条件下,对基于CV-CA、CVSinger、CV-CS(当前统计模型)以及 CV-HT(水平转动模型)4种混合模型的CM-IMMPDF算法进行1 000次蒙特卡罗实验,对它们的失跟率进行比较,表1给出了仿真结果。
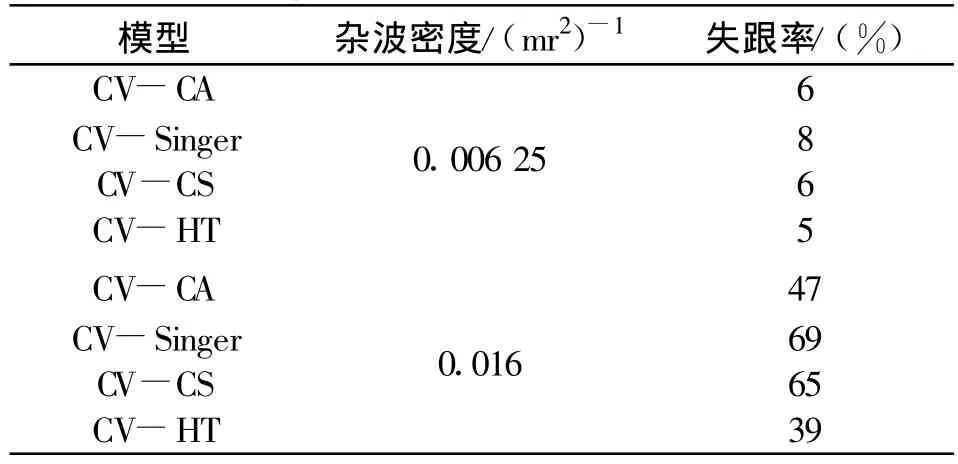
表1 不同杂波密度下各模型算法所对应的失跟率Tab le 1 Percentage of tracks lost in different clutter densities
从表中的结果可见,在杂波密度较低的情况下,各混合模型所对应的失跟率相当;在杂波密度较高的情况下,CV-HT模型对应的失跟率最低,因为该混合模型能较准确地描述目标的运动规律。图1给出了基于CV-HT混合模型的CM-IMMPDF算法得到的目标位置的均方根误差(RMS)曲线图。
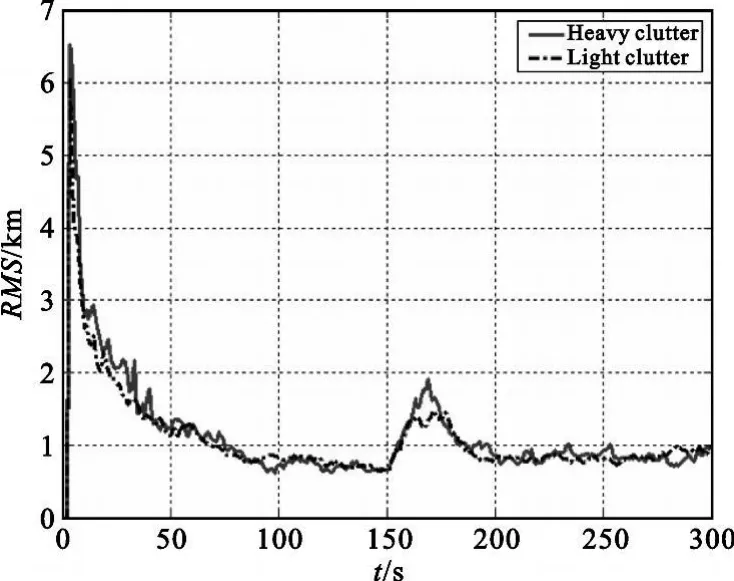
图1 CV-HT模型对应的目标位置的RMS曲线图Fig.1 R MS position error for CV-HT model
从仿真结果不难看出,CM-IMMPDF算法在选择合适的目标运动模型的前提下,对杂波环境下机动目标的跟踪效果还是比较理想的,目标位置的RMS基本在1 km以下,只有在目标做转弯动作时RMS的值略大,并且失跟率也较低。
5 结束语
本文提出的CM-IMMPDF算法是针对多站测向无源定位系统对目标进行观测所获得的观测方程是非线性的特点提出的。由于该系统的这一特点,传统的跟踪算法中通常选用扩展卡尔曼滤波,但这一算法的缺点是不稳定、易发散。而本文提出的算法则有效地克服了这一缺点,利用转换测量的卡尔曼滤波可将非线性的观测方程线性化,提高算法的鲁棒性;另外,由于有机结合了IMM和PDA算法,使目标运动模型更加合理化,并可将目标从杂波中分离出来,有效地解决了多站测向无源定位系统中机动目标的跟踪问题,为现代多站无源定位系统实施对敌目标跟踪提供了可靠的理论依据。但该算法存在的问题是,当杂波密度较高时,失跟率也会增大,这将是我们要进一步研究解决的问题。另外,该算法如与联合概率数据关联算法(JPDA)结合,则还可以完成多机动目标的跟踪,具体内容可见文献[7]。
[1] 蔡庆宇,薛毅,张伯彦.相控阵雷达数据处理及其仿真技术[M].北京:国防工业出版社,1997.
CAI Qing-yu,XUE Yi,ZHANG Bo-yan.Phased array radar data p rocessing and the simulation techniques[M].Beijing:National Defense Industry Press,1997.(in Chinese)
[2] Blackman S,Popoli R.Design and Analysis of Modern Tracking System[M].Boston:Artech House,1999.
[3] Mazor E,Averbuch A,Bar-Shalom Y,et al.Interacting mu ltiple modelmethodsin target tracking:a survey[J].IEEE Transactions on Aerospace and Electronic Systems,1998,34(1):103-123.
[4] Dufour F,Mariton M.Tracking a 3D maneuvering target with passive sensors[J].IEEE Transactions on Aerospace and Electronic Systems,1991,27(4):725-739.
[5] Hou les A,Bar-Shalom Y.Multisensor tracking of a maneuvering target in clutter[J].IEEE Transactions on Aerospace and Electronic Systems,1989,25(2):176-189.
[6] WANG Xuezhi,Challa S,Evans R.Gating techniques for maneuvering target tracking in clutter[J].IEEE Transactions on Aerospace and Electronic Systems,2002,38(3):1087-1097.
[7] 陈玲.无源定位与跟踪技术研究[D].北京:北京航空航天大学,2004.
CHEN Ling.Study of passive location and tracking technique[D].Beijing:Beijing University of Aeronautics and Astronautics,2004.(in Chinese)
Tracking Algorithm for Maneuvering Target in Multiple Passive Sensor System
CHEN Ling,CHEN De-huang
(Department of Aeronautic Electronic Engineering,The First Aeronautical Institute of Air Force,Xinyang 464000,China)
An tracking algorithm of maneuvering target is proposed for multiple passive sensor system.It is called CM-IMMPDF algorithm.The converted measurement Kalman filter(CMKF)algorithm is used instead of the conventional extended Kalman filter(EKF)to improve the tracking performance.The proposed algorithm combines CMKF with both Interactive Multiple Model(IMM)algorithm and Probabilistic Data Association(PDA)algorithm.Simulation results show that the CM-IMMPDF algorithm is effective to track a maneuvering target in clutter for multiple passive sensor system.
passive sensor system;maneuvering target tracking;CMKF;IMM algorithm;PDF algorithm
TN911.7
A
10.3969/j.issn.1001-893x.2010.11.003
1001-893X(2010)11-0010-05
2010-07-15;
2010-09-02
陈 玲(1972-),女,江西南昌人,1994年于郑州大学获学士学位,2005年于北京航空航天大学获博士学位,现为讲师,主要研究方向为无源雷达的目标跟踪及数据互联等;
CHEN Ling was born in Nanchang,Jiangxi Province,in 1972.She
the B.S.degree from Zhengzhou University and the Ph.D.degree from Beijing University of Aeronautics and Astronautics in 1994 and 2005,respectively.She is now a lecturer of The FirstAeronautical Institute of Air Force.Her research interests include mu ltitarget tracking and data association of passive radar.
Email:jingle-cl@sina.com
陈德煌(1957-),男,福建莆田人,1987年获北京航空航天大学博士学位,现为教授,主要研究方向为通信导航装备发展与维护。
CHEN De-huang was born in Futian,Fujian Province,in 1957.He received the Ph.D.degree from Beijing University ofAeronautics and Astronautics in 1987.He is now a professor of the First Aeronantical Institute of Air Force.His research concerns communication and navigation.