一种多值逻辑控制器在陆战平台武器系统中的应用研究
2010-01-20王珂珂周启煌赵汗青
王珂珂,周启煌,赵汗青
(装甲兵工程学院控制工程系,北京 100072)
一种多值逻辑控制器在陆战平台武器系统中的应用研究
王珂珂,周启煌,赵汗青
(装甲兵工程学院控制工程系,北京 100072)
在对陆战平台炮控系统进行分析和仿真的基础上,重点研究了当受到行驶路面干扰、噪声干扰以及参数扰动时,在原系统的前向通道并联使用一个多值逻辑控制器对其进行控制的方法,并详细分析了其控制效果。该控制器的参数易于整定,动静态性能良好,对一般二阶对象具有较好的控制效果。仿真结果证明,该控制器不仅提高了系统的响应速度、减小了跟踪滞后误差和提高了抗干扰性能,还在一定程度上解决了系统参数变化的鲁棒性问题。
自动控制技术,陆战平台,逻辑控制器,炮控系统
陆战平台火控系统是实现陆战平台武器系统射击过程自动化和提高射击精度的一个人机系统,它是充分发挥陆战平台火力和提高战场生存能力的重要手段。火控系统的发展主要是将一些新的技术在控制主线前端叠加的结果。但是各种新技术在控制主线前端的应用,及其在控制精度乃至系统反应速度上的效果,最终得由末端上的炮控系统的控制效果来体现。现装备的大多数火控系统在火炮本身的控制问题上,只采用简单的控制方式,使得现有的炮控系统的性能指标明显满足不了火控系统的要求,而且现有的火炮稳定系统还存在不少固有的缺陷,严重地影响着火控系统技术性能的进一步提高[1]。因此,研究新型炮控系统已经成为一个十分迫切的任务。
基于泛布尔代数的多值逻辑控制器是一种智能控制器[2]。该控制器使用比较简单的控制规则,并把相平面法引进到了控制器的分析与整定中,在不同的区域采用不同的控制作用,根据实际对象和人的控制思想进行控制并确定控制参数,其参数易于整定,有良好的动静态性能,对一般二阶对象具有较好的控制效果,而且该控制器没有PID控制器各个参数的互相影响问题,也不存在模糊控制输出结果难以直观理解的问题,是一种模拟人类控制行为的控制器。
本文在对陆战平台炮控系统进行分析和仿真的基础上,重点研究了当受到行驶路面干扰、噪声干扰以及参数扰动时,在原系统的前向通道并联使用一个多值逻辑控制器对其进行控制的方法,并详细分析了其控制效果。
1 系统数学模型及问题的描述
陆战平台炮控系统即对火炮的操纵和稳定系统,是火控系统的重要组成部分。火炮通过炮塔与车体连接,一方面随着炮塔在水平面内做旋转运动,另一方面,在车体垂直面内,随着车体的仰俯,绕耳轴做摆动。这就要求炮控系统能够保证在陆战平台行进时,对火炮所赋予的高低和方向角度不受车体震动的影响,同时炮手能轻便、快速地操纵火炮,实现快速瞄准和精确射击[3]。
以某型陆战平台的高低向火炮稳定系统为例,当忽略了一些次要因素的影响后,其结构图如图1、图2所示。
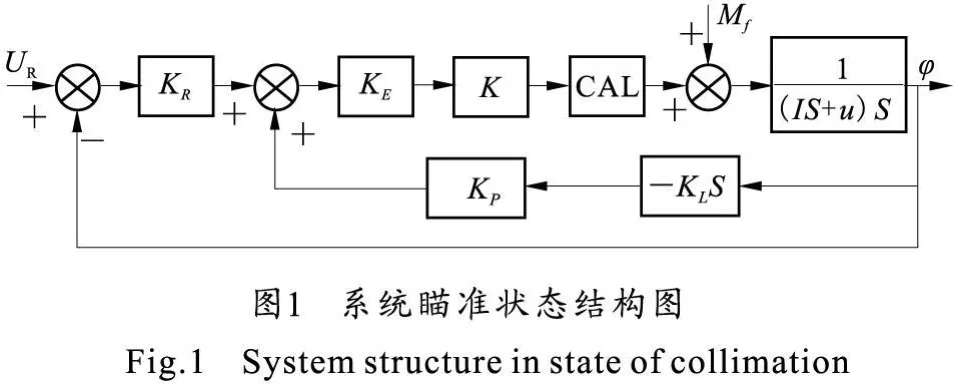
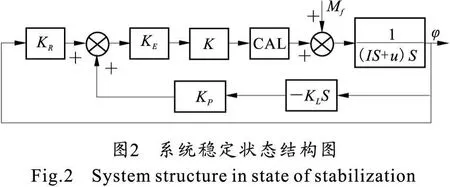
在该系统中,KR,KE,K,KP,KL为各相应部分的放大系数;CAL为动力油缸放大系数;I为火炮相对耳轴的转动惯量;u为摩擦系数;UR为角度传感器外环的转角,即火炮仰角的输入给定值。Mf为陆战平台在起伏路面行驶的条件下,由于车体的俯仰加到火炮耳轴上的一个干扰力矩,此处假设干扰力矩为正弦信号或白噪声信号。代入各参数的具体数值后,该闭环系统的传递函数为:

1)当系统处于瞄准状态时,由模型分析可知,该系统对于位置输入信号阶跃响应无静差,而对斜坡输入则存在静差。
当输入θ=10 mrad的阶跃信号时,系统过渡时间ts=0.8 s,稳态误差为θ=0 mrad。当输入为θ=20 mrad斜坡信号时,系统的跟踪滞后误差为θ=4 mrad。
2)当系统处于稳定状态时,干扰输入为最大值15 000 N·m的白噪声,稳定精度小于2 mrad。
从上述分析可知,为满足实际应用需要,系统的响应速度、跟踪滞后误差和抗干扰等性能都需要加以改进。
2 基于泛布尔代数的九态逻辑控制
逻辑控制早已广泛应用于工程和科学的各个领域,其理论基础是布尔代数。将布尔代数的概念推广,令系统中每个因素可以拥有多个状态变量,而每个状态变量则由0、1两种数值组成。在此基础上,推理出一整套有别于布尔代数的泛布尔代数规则,并将其应用于控制领域,取得了很好的效果[4-5]。
在控制领域中,可以将控制的条件简化为不同的因素,并按照泛布尔函数的规律进行控制。由于其控制结果是多值逻辑的,又可简称为逻辑控制。基于泛布尔代数的九态逻辑控制器的控制思路是:该控制器根据这些由偏差 ——偏差变化率的组合而形成的9种工况采取相应的控制策略(控制作用力),及时向控制对象进行能量补充和消耗,从而达到控制的目的和跟踪性能的要求。即当被控对象输出偏离设定值时,控制器会自动加上一个作用力,迫使系统响应回归到设定值附近。
九态逻辑控制是按照泛布尔代数理论及相应的定义运算进行的,其本质是模拟人的思维习惯而进行逻辑判断的开环控制,同时,依照误差e和误差变化率˙e对系统运行状态进行闭环逻辑调整,其系统组成如图3所示。u(t)为给定输入,y(t)为输出响应,定义偏差 e(t)=y(t)-u(t),偏差变化率˙e(t)=(ei-ei-1)/T,其中 T为采样周期,i和i-1分别为本次采样时刻和上次采样时刻。设±e0为系统允许误差(误差限,其中+e0为误差上限,-e0为误差下限),±˙e0为系统允许误差变化率(其中 +˙e0为误差变化率上限,-˙e0为误差变化率下限)。

九态逻辑控制器的作用相当于一个增益为K的比例控制器,通过在不同工作状态设定K取9种不同的值从而实现控制作用。K的选取是基于规则的,其控制规则表如表1所示。从控制规则表可以看出,控制器有误差和误差变化率两个输入参数,且各有3种状态,故控制器有9种工作状态。虽然在每一种工作状态下,它是一个线性控制器,但作为一个整体,它却是一个非线性控制器。对于每一种工作状态,可以运用线性控制理论来进行分析,近似确定九态控制器的参数。
其中,+K4为强正控制量,+K3为较强正控制量,+K2为次强正控制量,+K1为较弱正控制量,K0为保持控制量,-K4为强负控制量,-K3为较强负控制量,-K2为次强负控制量,-K1为较弱负控制量。
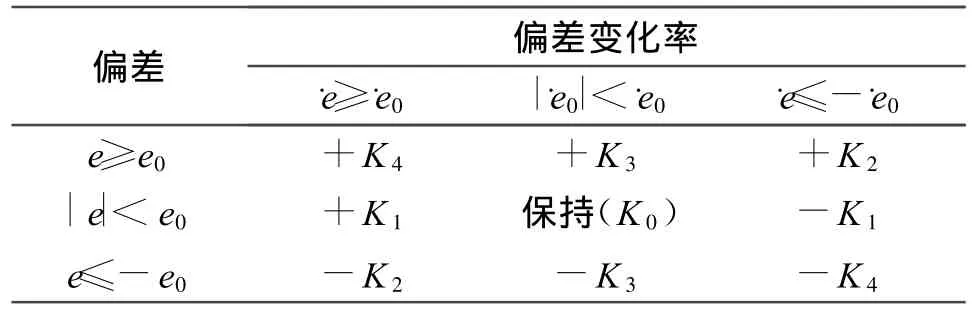
表1 九态逻辑控制器控制策略Tab.1 Control Strategy of Nine-state Logical Controller
由于控制规则表与相平面有一一对应的关系,故可以用相平面分析方法对九态控制器进行辅助设计,设定表格中的各个参数,相平面图如图4所示。图中直线L1和L2所夹区域构成误差变化率˙e的零带,直线L3和L4所夹区域构成误差e的零带。

九态逻辑控制器采用相平面辅助分析方法,其相平面的每个象限都与控制曲线图的各个阶段相对应,具有明确的意义。在实际应用中,零区并不是完全为零,而是存在着一个满足系统控制要求的很小的区域。
其实现过程是:计算机不断对被控对象的输出进行观测,并与控制输入对比,求解误差及误差变化率,然后控制器按仿人逻辑判断来确定此时误差及误差变化率的所属分类,不断在九种控制作用力中来回切换,直至系统被控制在预定的状态下。由于控制规则对对象无严格限制,因而基本型逻辑控制可以应用于很多领域。
总之,基于泛布尔代数的逻辑控制具有人的控制特点:开环控制+反馈校正+强时变控制。同时,文献[5]已经证明,此控制器概念清晰,对模型不敏感,抗干扰能力强,且具有很强的鲁棒性能。
3 九态逻辑控制器设计与控制效果分析
新系统的设计思想以现代控制技术对原系统进行技术改造为主,图5给出了使用多值逻辑控制器后新系统的结构框图。
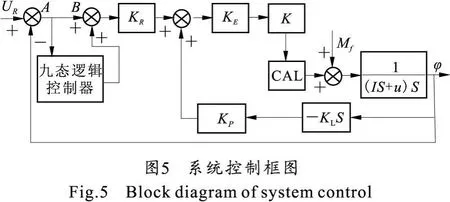
新系统是在原有火炮稳定系统的前向通道并联增加了1个九态逻辑控制器,该控制器在A点处采集稳定系统的误差信号,又在B点处向稳定系统增加综合控制信号。原系统A点到B点的信号通道不变,因此新系统采用的是计算机监督控制(SCC)的结构方案。SCC的结构具有较大的灵活性,当计算机控制加入时,它是一个具有全新性能的数字式炮控稳定系统,计算机控制断开后,又可保持原有稳定系统功能不变。
结合控制规则表和阶跃响应曲线图,对于不同的控制阶段,以K=0为基准增大或减小,可得各个参数对控制过程的影响。比如:+K4增大,能使系统快速地稳定,但超调量很大;+K2增大,可以有效地减小上升时间,但同时会增大超调量;-K2增大,可以在该控制阶段快速下降;-K4增大,可以减小超调量,并使系统快速进入稳态;K0取按二阶工程最佳方法设计出来的K值。
因此,九态控制器中K的设计思路为:先将+K4和-K4设定为允许的最大值,同时根据上升时间和下降速度的要求设定+K2和-K2,然后根据+K4、+K2、-K2、-K4及系统性能要求合理地选择 +K3、+K1、-K1、-K3,最后将 K0取为按照二阶工程最佳方法设计出的K值。
针对火炮稳定系统的自身特性,相平面分区控制参数取值为:+K4=10,+K3=7,+K2=4,+K1=1,K0=0,-K1=-1,-K2=-4,-K3=-7,-K4=-10,偏差e0和偏差的导数˙e0取值分别为:e0=±0.004,˙e0=±0.004。相平面分区控制的动态过程由9个控制力的交互作用完成,最终稳定在K0的作用下。
对比前述初始系统的各种信号输入情况,新系统的仿真结果如下:
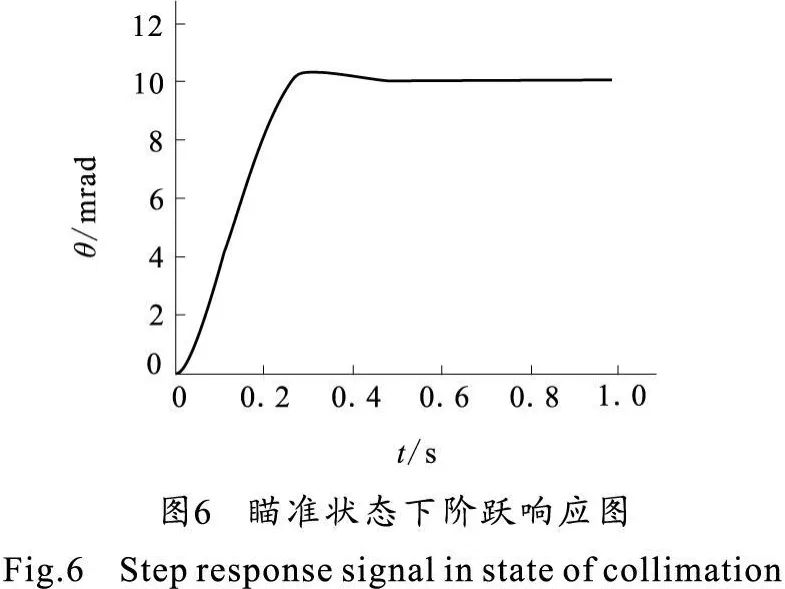
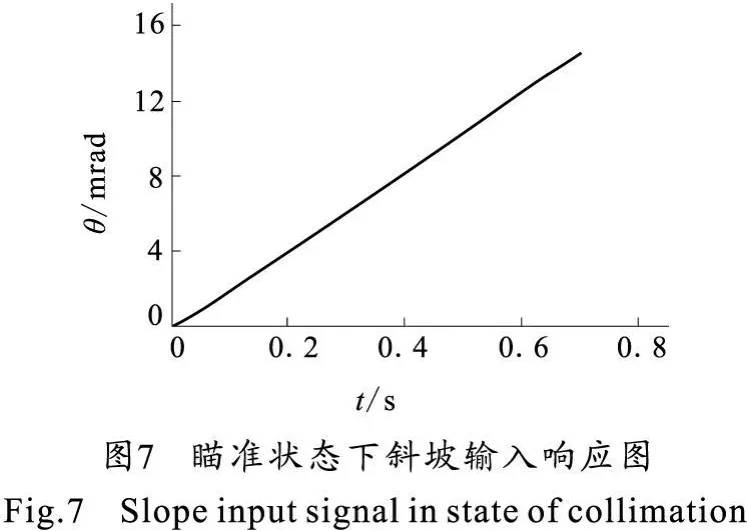
1)瞄准状态下,如图6、图7所示。阶跃信号输入时,系统反应时间减小了0.4 s;斜坡信号输入时,系统在第0.6 s前跟踪滞后误差小于0.2 mrad,在0.6 s后跟踪滞后误差几乎为0。
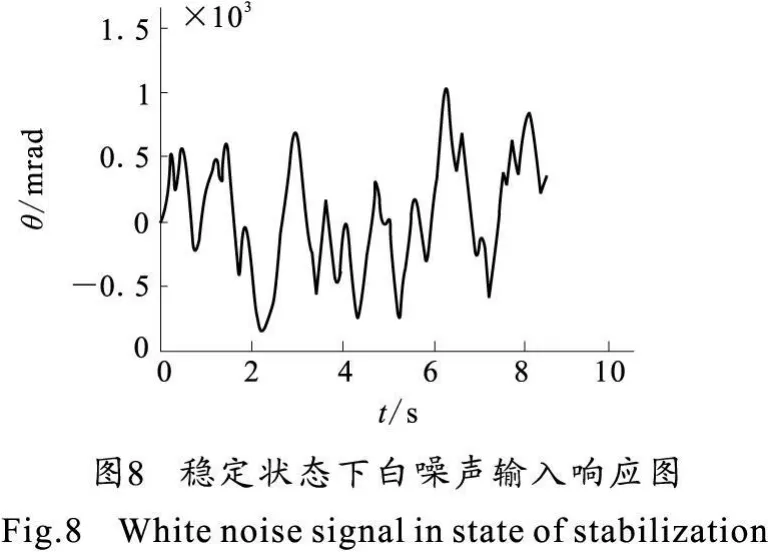
2)稳定状态下,如图8所示。白噪声干扰输入时,系统的稳定精度小于1.1 mrad。
可见,在原系统的前向通道并联增加一个合适的多值逻辑控制器后,系统的反应时间、稳定精度、跟踪精度以及抗噪声信号干扰性能都有很大程度的提高。
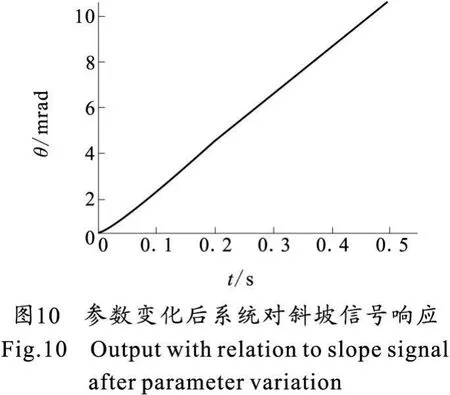
3)模型参数变化
下面研究系统参数改变,即由于传感器测量误差和执行机构因外界干扰引发参数变化,实际模型改变时,该控制系统的表现。假设原系统的传递函数改变为:

在不改变控制器任何参数的情况下,多值逻辑控制输出如图9、图10所示。
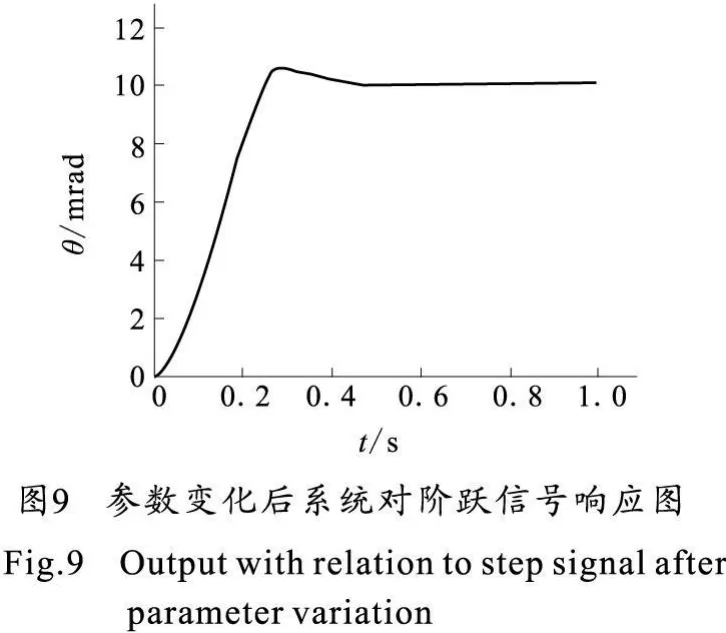
可以看出,在模型参数变化的情况下,系统的输出响应和无不确定参数时系统的响应基本相同,这充分说明了设计出的反馈控制器具有很强的鲁棒性。这是因为逻辑控制器在超出误差允许范围后强制进行控制,并迫使输出回归到合理范围。
4 结 论
本文以泛布尔代数为基础,采用一种多值逻辑控制器对陆战平台的炮控系统进行了控制仿真。利用泛布尔代数逻辑控制器的结构简单、数学概念清晰和对模型要求不高的特点,使用逻辑控制器强制约束输出曲线,运用逻辑推理、判断,做出在异常情况下能保证过程稳定运行的控制决策。将该控制器并联接入原炮控系统的前向通道后,不仅提高了系统的响应速度、跟踪滞后误差和抗干扰等性能,还在一定程度上解决了系统参数变化的鲁棒性问题。
References)
[1]周启煌,单东升.坦克火力控制系统[M].北京:国防工业出版社,1997.
ZHOU Qi-huang,SHAN Dong-sheng.Tank fire control system[M].Beijing:National Defence Industry Press,1997.(in Chinese)
[2]张南纶.新控制原理[M].北京:国防工业出版社,2005.
ZHANG Nan-lun.New control principle[M].Beijing:National Defence Industry Press,2005.(in Chinese)
[3]栗建中.坦克火炮控制系统设计与仿真[D].南京:东南大学,2006.
LI Jian-zhong.Tank gun control system design and simulation[D].Nanjing:Southeast University,2006.(in Chinese)
[4]孙晓明,张南纶.九点控制器[A].见:第四届全球智能控制与自动化大会论文集.上海:华东理工大学出版社,2002:644-648.
SUN Xiao-ming,ZHANG Nan-lun.Nine-point controller[A].In:WCICA′2002.Shanghai:East China University of Science and Technology Press,2002:644-648.(in Chinese)
[5]张南纶,邱国廷,季玲莉.九点五态控制器及其仿真分析[A].见:第五届世界智能控制与自动化大会论文集.杭州:浙江大学出版社,2004.2570-2574.
ZHANG Nan-lun,QIU Guo-ting,JI Ling-li.Ninepoint five-state controller and its simulation research[A].In:WCICA'2004.Hangzhou:Zhejiana University Press,2004:2570-2574.(in Chinese)
Study on A Multi-Logical Controller and Its Application in Ground Warfare Weapon Platform System
WANG Ke-ke,ZHOU Qi-huang,ZHAO Han-qing
(Department of Control Engineering,Armored Force Engineering Academy,Beijing 100072,China)
Based on analysis and simulation of gun control system in the ground warfare platform,A kind of multi-logical controller and its control method were researched mainly under the conditions of that there existed travelling road disturbance,noise jamming and parameter perturbation,and its control effect was analyzed in detail.The parameters of the controller were apt to adjust.The controller has good dynamic and static state performances,and it has better control effect with relation to the second order system in general.Simulation results showed that the controller can not only improve the response speed of the system,decrease the tracking hysteresis error,enhance the anti-interference performance,but also solve the robustness problem of system parameter variation to a certain degree.
automatic control technology;ground warfare platform;logical controller;gun control system
TP391
A
1673-6524(2010)04-0046-05
2010-02-09;
2010-07-22
王珂珂(1982―),男,博士研究生,主要从事火炮稳定控制、自主车运动控制研究。E-mail:pengkily@163.com