CO2循环压缩机的防喘振控制方案
2010-01-12彭海滨
彭海滨
(中国寰球工程公司,北京 100028)
0 引 言
CO2压缩机是环氧乙烷装置中常见的设备,用于乙烯和氧气反应后的CO2的运输,由于采用离心式压缩机,所以不可避免地要涉及压缩机的防喘振控制和停车系统。被控气体的压力和流量大幅度地波动,会破坏工艺系统的稳定性,使压缩机发生喘振,效率降低,甚至造成爆炸、火灾等事故,另外还会影响和压缩机相连的其他设备的正常运转,使一些测量仪表准确性降低,甚至失灵。
下面就防喘振控制所涉及的压力控制(PC)、流量控制(FC)、电流控制(IC)、用户直接信号控制(HC)、喘振检测报警(SDA)以及喘振联锁停车(TS)等方面的复杂控制进行阐述。
1 离心式压缩机的典型防喘振设计方案
在国家标准规范中,对离心式压缩机的防喘振控制有基本要求。对于EO/EG装置中的CO2压缩机,由于在其实际试车及开车之前需进行氮气吹扫运行,故在控制器中必须增加两者切换功能并改变相应参数,但必须停机才可进行CO2模式和N2模式的切换。图1为防喘振控制典型流程。为使压缩机运行稳定,需在流量减少的情况下,为压缩机配备一个喘振阀,用来弥补当前流量与最小体积流量的差异。喘振阀通过流量喘振控制器进行控制。喘振过程取决于各种因素(温度,压力等),安全边缘必须分开喘振线和喘振控制线,以确保稳定控制的特性,如图2所示。
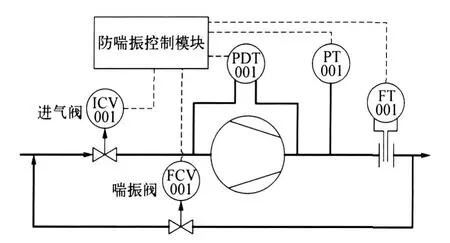
图1 离心式压缩机典型防喘振控制方案
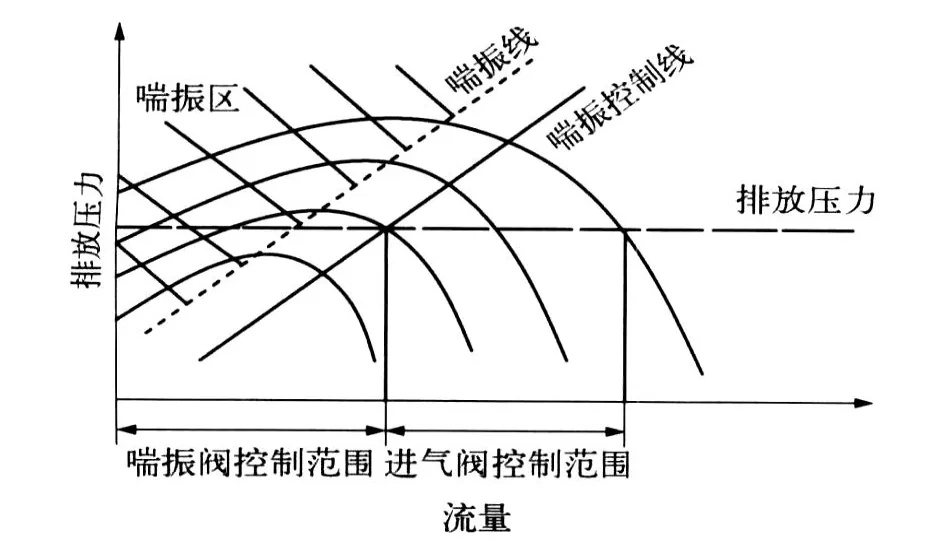
图2 防喘振控制工作原理
2 压缩机的防喘振控制方案
防喘振控制方案如图3所示,主要包括:
压力控制器:如果排放过高压力,压力控制器打开喘振阀FCV-001。
流量控制器:如果太靠近喘振控制线,即排放过小流量,流量喘振控制器打开进气阀ICV 001。
电流控制器:如果电流高,电流控制器限制进气阀ICV-001开度。
喘振阀手动控制 HC1:DCS模拟输入给喘振阀,流量喘振控制器或压力控制器可旁路该信号。
进气阀手动控制HC2:DCS模拟输入给进气阀,电流器可限定该信号。
喘振检测报警:控制中的每个被检测到的喘振都将被计数。如果在控制时间内,计数器达到报警喘振的数目,就会触发一个喘振报警。
喘振联锁停车:如果在控制时间内,SDA计数器计数达到压缩机联锁值,压缩机即被停车。
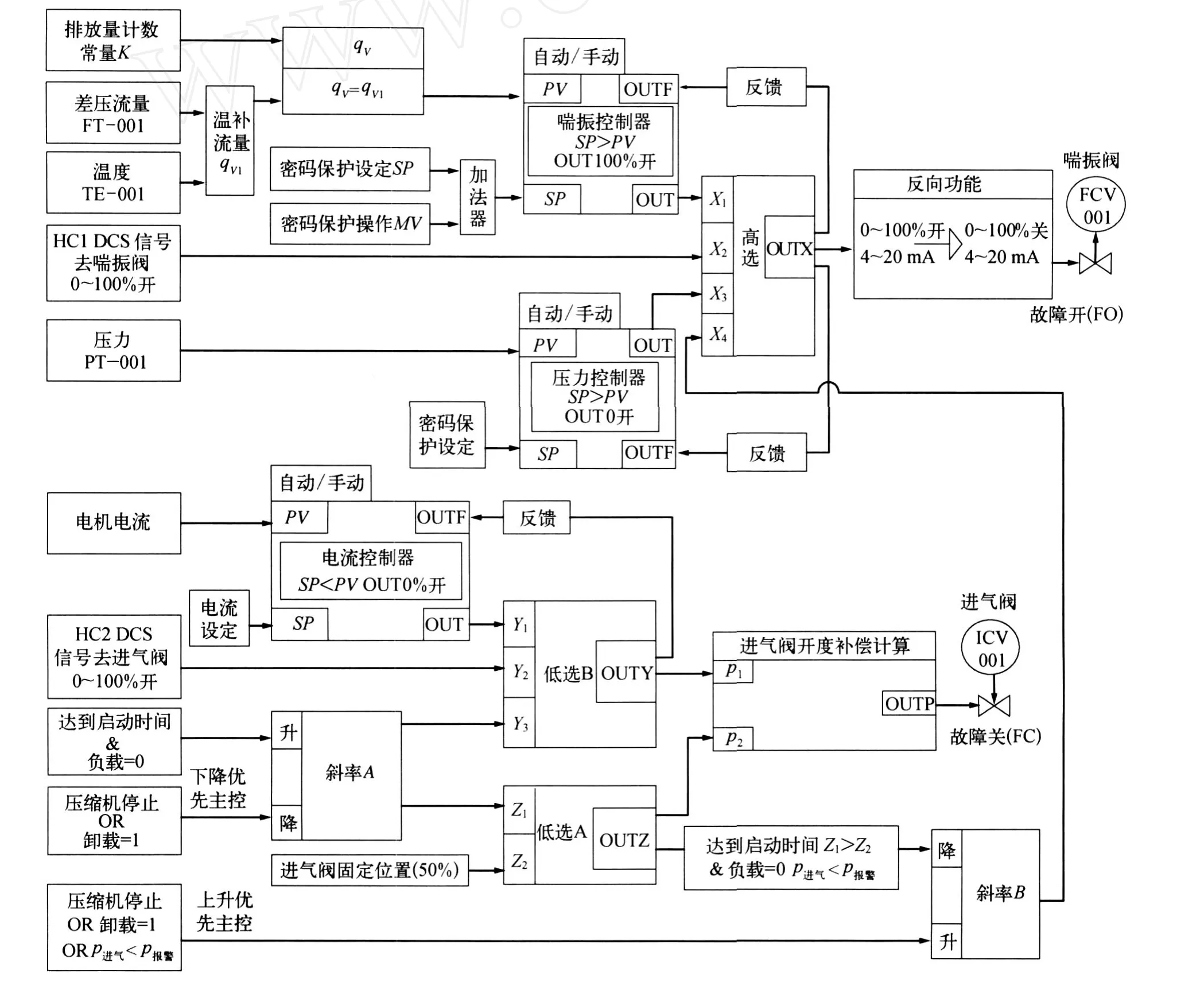
图3 压缩机防喘振控制方案注:斜率A,斜率B——上升端以3%/s的速度从0升至100%,下降端以3%/s的速度从当前值降至0。斜率A和斜率B原理完全一样,升和降来自输入变量
2.1 流量控制
流量从0到100%是由喘振阀和进气阀控制。依赖于排放压力,设定流量操作范围的0到70%是由喘振阀控制,70%至100%是由进气阀来控制。如果流量高于70%,喘振阀全关,进气阀就可以在最小操作位置和100%之间进行调节。
由于流量喘振控制器的任务是防止压缩机发生喘振,故流量喘振控制器的最终调节有密码保护,并由压缩机制造厂在试车时调试。流量可由下式得出:

式中 qV——实际流量,m3/h;qV1——温度补偿流量;K——气体排放常数;ΔpPDT-001——压缩机的排放压差,kPa;TTE-001——压缩机排放侧温度, K;pPT-001——压缩机排放侧(表压)压力,kPa。
流量喘振控制器设定值S P是一个固定值(“固定喘振线”=喘振线+安全边缘线),由压缩机厂商在试车过程中设置。流量喘振控制器比较 S P和PV之差(S P-PV),并且总是希望二者无限接近。一个正向的差值使得控制器的输出信号增加,喘振阀的开度增大。反之则是需要让控制器的输出信号减少,并使得喘振阀关闭。
喘振阀的开启信号由压力控制器、送给喘振阀的DCS信号(HC1)和喘振斜率B三者高选后得出。高选后的值经由反向功能连接到喘振阀,喘振阀为故障开启型。流量喘振控制器是一个安全控制器,因此只能在极端操作条件下才起作用,正因为这样,高选后输出的反馈返回到压力控制器和流量喘振控制器。为保证安全,压力控制器和流量喘振控制器的输出比高选输出要低4%,这个数值可以根据实际情况进行调整。
如果流量喘振控制器或压力控制器之一调至手动(密码保护),斜率B将降至0,调至手动的控制器的输出可以通过手动更改,进而控制喘振阀的开度。如果这两个控制器都被重置为自动,斜率B将恢复至正常功能,整个系统又可以进入自动工作状态。如果压缩机停机,流量喘振控制器 PV置0,此时测量值和设定值的差值最大,但流量计的监测信号要延迟40 s才能停止。
喘振阀的迅速关小或关闭会出现震荡性喘振,所以要选择对于信号反应是快开慢关型的防喘振控制阀,也可在压力控制器中增加一个快开慢关的非对称输出单元,即对喘振阀的开度增加速率不限制,但对其减少开度的速率进行限制。另外要求喘振阀为弹簧负载型,故障开启以减少泄气量,符合ANSI/FCI 70.2IEC605344的六级密封要求。
2.2 压力控制
排放压力控制器的设计要避免压缩机排放压力超出最大允许值。压力控制器比较 S P和 PV的差值,并且总是试图实现二者无限接近。另外,对于流量喘振控制器控制方案来说,通过RBF神经网络算法的PID控制可以较好地实现这一控制要求。
2.3 电流控制
电流控制器比较 S P和 PV的差值,稳定运行。根据工程经验,进气阀的开度为:

式中 P1——电流控制器、DCS信号至进气阀(HC2)和进气阀斜率 A三者低选(低选B的输出);P2——斜率 A和进气阀最大开度的低选(低选A的输出)。
电流信号4 mA对应阀门最小开度,20 mA对应阀门最大开度。一个反向的控制误差(S P<PV)产生一个逐渐减少的控制器输出信号(此时进气阀开度受到限制);而一个正向的控制误差则产生一个逐渐增加的控制器输出信号(此时进气阀开度增大)。
因为电流控制器也是安全控制器,在极端操作条件下才起作用,所以低选B的输出反馈至电流控制器,为了安全,该电流控制器的输出电流总是比低选B的输出要低4%,这个值完全可以根据实际情况进行调整。另外,利用VB编程可以实现进气阀和喘振阀的信号输入曲线图,把二者的中间数值输出,通过PID调节来处理这些输出值,可以很好地调节进气阀和喘振阀的开度,详细设计过程不再赘述。
2.4 喘振阀手动控制
把接收的DCS至喘振阀的信号送至高选,可随时开启喘振阀,而不管压力控制器、流量喘振控制器或排放斜率B对喘振阀关闭的限制。
当压缩机启动,并经过启动时间t1,负载为0,进气阀信号 Z1已达到并超过了其最小操作位置Z2,即低选A的输入 Z1>Z2,且进气压力大于设定的报警压力 pAL,此时斜率 B触发,其斜率从100%到0,喘振阀的开度从100%转为高选控制。
在启动期间,DCS的 HC1信号送至喘振阀,应被设置为100%,并且可通过DCS施加给过程控制器的启动斜率来关闭喘振阀。如果卸载为1,或压缩机关闭,或吸气压力 p下降到报警值pAL以下,斜率B触发,斜率达到100%,喘振阀得以打开。根据工程经验,喘振阀的打开时间:
式中 d——喘振阀的流通口径,in(1 in=2.54 cm)。
2.5 进气阀手动控制
不管电流控制器或斜率A如何限制进气阀的开启,把接收的DCS至进气阀的信号送至低选B,都可随时关闭进气阀。进气阀应为弹簧负载和故障关闭(Fail to Close)型。
当压缩机启动,并且达到启动时间 t1,负载为0,A触发,从0升到100%,分两路输出,一路输出至低选B;另一路经过A,结合进气阀最小位置设定值进行输出。在开车期间,DCS的HC2信号至进气阀应设置为0,经过低选B送至高选,直至喘振阀完全关闭。如果触发了卸载为1信号或压缩机关闭,则斜率A触发为0,此时进气阀将关闭。
如果电流控制器设置为手动(密码保护),使得斜率A至100%,那么输出值就可以进行手动更改。如果电流控制器设置为自动,则斜率 A将恢复正常功能。
3 喘振检测报警SDA及联锁TS
作为流量喘振控制器的备用,压缩机要配备一个独立的喘振检测系统,用于紧急停车。其中有三种工作模式可以选择,即监测压力 pT001变化率;监测差压流量qVT001变化值;第三种是同时对二者进行监测。
3.1 监测压力信号的斜率
假定输入值扫描的周期为30 ms,从这些扫描值中,可以计算出斜率Δh/dt(Δh=h2-h1),即在30 ms内的信号改变率。引入扫描的数量,就可以计算出斜率长度。测量参数持续过程须按照特定应用来进行调整。
实际斜率要与试运行期间的斜率限定值进行比较。根据压缩机固有喘振曲线进行分析,对于某一固定转速,其排放压力和排放流量的曲线是固定的。在排放压力(或出口和入口压力比)达到最大时,如果该压力(或压力比)减小,同时流量减小,压缩机进入喘振区,即只有压力(或压力比)的反向斜率才被认为是有效喘振。计算值达到或低于第一个斜率限定值,即被检测为一个喘振,放入计数器中,用于报警和联锁。在探测到第一次喘振时,随后的斜率必须要达到第二个限定值,才被计为第二个喘振,此时第一个斜率限定值大于第二个斜率的限定值,如果前者小于后者,说明转速在降低,压缩机并未进入喘振区,不能记为一次喘振。喘振测量参数的选择都要在试车期间经过评估和选择。对每一个压缩机,第一斜率、第二斜率和用于斜率计算的测量扫描数量都是确定的,都必须由压缩机制造厂进行调整。
3.2 监测差压流量
由于压缩机在喘振时流量会停滞和逆转,整个流量计的差压会下降,当其低于极限值,便被检测为一个喘振,导入到计数器用于报警和联锁。不论何时,只要差压信号降至限定值以下即被检测为一个喘振。在下一次检测到喘振之前,差压信号必须增加到差压限定值和差压限定滞后之和以上。对于每一个压缩机,差压限定和差压限定滞后的值也都是确定的,必须由压缩机制造厂进行调整。
3.3 联锁停车
喘振监测压力信号和/或差压流量信号,一旦压缩机启动,并且达到启动时间,喘振检测系统即处于激活状态;当压缩机关闭,则喘振检测系统停止。第一个被探测到的喘振将启动一个时控计数器。每个被检测到的喘振都将被计数。如果在控制时间内,计数器达到报警喘振的数目,就会触发一个喘振报警;如果在控制时间内,计数器计数达到压缩机联锁值,触发一个故障联锁,压缩机即被停车。在控制时间终止之前,如果计数器没有达到喘振探测报警和联锁的数目,该计数器将被清零。
在控制时间达到之后,复位一次即可消除当前的所有警报。在压缩机运行期间,存储的最大探测斜率、第一到第四喘振值和所有探测到的喘振数都不能被重置,但使用密码保护屏上的复位键将会复位所有报警和联锁。
4 结束语
防喘振控制对于CO2压缩机的稳定传送发挥重要的作用,通过熟悉掌握工艺过程和压缩机的操作性能,通过采用压力控制、温度控制、流量控制、电流控制,结合串级控制、比例积分控制和非对称输出,使压缩机机组具有足够的灵活性和可靠的防喘振保护系统。在非满负荷的工况下,效率最高,操作范围宽,设备安全。对压缩机机组控制和保护系统进行组态和调试,获取最合适的控制方案,确定压缩机机组的诊断系统,从而使压缩机控制系统达到最佳化和最优化。
[1] VENTZAS DE,PETROPOULOS G.Industrial Compressor Anti-SurgeComputerControl[J].WorldAcademy of Science,Engineering and Technology,2007,34:7-11.
[2] 陆德民,张振基,黄步余.石油化工自动控制设计手册[M].3版.北京:化学工业出版社,2000.
[3] 黄浩辉,李德麟.离心式压缩机防喘振调节系统[J].化工自动化及仪表,1981,8(7):38-45.
[4] KLAUS B,MARYBETH G. Application Guidelinefor Centrifugal Compressor Surge Systems[M].4.3ed.USA:Gas Machinery Research Council Southwest Research Institute,2008.
[5] 郑水成,董爱娜.离心式压缩机防喘振控制系统设计探讨[J].石油化工自动化,2004,(5):18-19.
[6] Fisher-Emerson Process Management.Optimized Anti Surge Control Valves[G].USA:Fisher-Emerson Process Management,2006.
[7] 魏 华.防喘振控制系统的模型及在甲醇项目中的应用[J].石油化工自动化,2008,44(4):8-12.
[8] 中华人民共和国机械部.G B/T 16941-1997流程工业用透平压缩机设计、制造规范与数据表[S].北京:中国标准出版社,1997.
[9] HELVOIRT J V.Centrifugal Compressor Surge,Modeling and Identification for Control[M].Netherlands:Technical University Eindhoven,2007.
[10] 黄钟岳,于晓放.透平式压缩机[M].北京:化学工业出版社,2004.