舰载声纳波束稳定与俯仰的研究
2010-01-09徐贤忠张秋生刘云涛邓红超
徐贤忠,张秋生,刘云涛,邓红超
(1.海军驻无锡地区军事代表室,江苏 无锡 214061;2.中国科学院声学研究所,北京 100190)
舰载声纳波束稳定与俯仰的研究
徐贤忠1,张秋生2,刘云涛2,邓红超2
(1.海军驻无锡地区军事代表室,江苏 无锡 214061;2.中国科学院声学研究所,北京 100190)
当船体发生摇摆或者需要将波束指向不同深度的水层时,需要对舰载声纳的波束进行稳定或俯仰控制。文章推导了甲板坐标系和大地坐标系之间的变换关系,并基于圆柱阵声纳,分析讨论了在不同的波束俯仰角下,圆柱阵换能器二维波束形成的性能。当俯仰角度较小时,在垂直方向上进行粗分层即可达到较好的性能;当俯仰角度较大时,则必须要对各阵元进行更精细的延迟控制。
波束俯仰;波束稳定;坐标变换
引言
舰载声纳是水面舰搜索水下目标、进行水声通讯,并引导火力系统进行攻击的重要手段。现代反潜战要求舰载声纳作用距离远、搜索速度快、能以多波束方式全面观察和监视周围海域[1]。由于水面舰航速较高,以及海面风浪的影响,船体容易发生摇摆,这将会影响波束扫描的效果,为了能够对目标进行精确定位和自动跟踪,有必要进行电子波束俯仰和稳定控制。
除了大地坐标系,还需要建立一个基于本舰甲板的坐标系。当船体静止不摇摆时,这两个坐标系相互重合;当船体摇摆时,要求出两坐标系之间的变换关系以稳定波束。为了能够探测不同深度的水层,也要能够在垂直方向上对波束进行一定的俯仰控制。
换能器安装在舰艇壳体上的声纳称为舰壳式声纳,比如安装在球鼻艏内的圆柱换能器基阵声纳[1]。本文以圆柱阵为模型,推导了甲板坐标系与大地坐标系之间的矩阵变换关系,并给出了圆柱阵的二维波束形成指向性,讨论了不同的俯仰角度对二维波束形成性能的影响。
1 坐标变换的推导
1.1 平面向量旋转
平面向量a由角度φ逆时针旋转θ到向量b,如图1所示,设向量长度为r,则两个向量的坐标之间满足变换关系:

即:

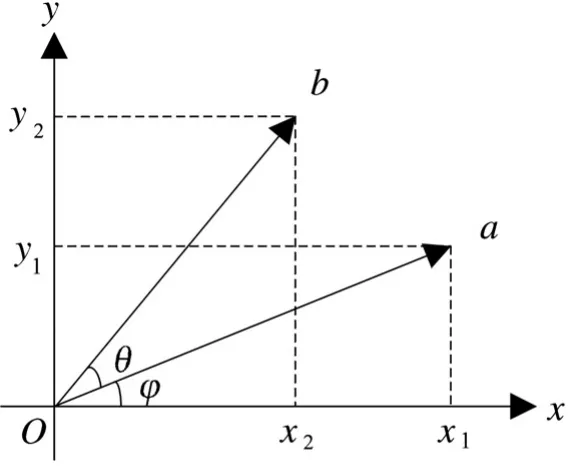
图1 平面向量旋转
1.2 空间向量旋转
空间向量a绕x轴逆时针旋转θ到向量b,如图2所示,两向量对应的x轴坐标不变,yoz平面对应坐标满足平面向量旋转关系,所以:


图2 空间向量旋转
同理,如果空间向量a绕y轴逆时针旋转θ到向量b,两向量对应的y轴坐标不变,zox平面对应坐标满足平面向量旋转关系,所以:

1.3 船体纵摇与横摇
设圆柱阵半径R,高度H。如图3定义甲板坐标系xyz,舰艏方向为y轴,坐标系原点O位于圆柱阵的几何中心点上,图中只绘出了圆柱阵的上半部分。当船体没有横摇和纵摇时,甲板坐标系xyz与大地坐标系x’y’z’相互重合,如图4所示。
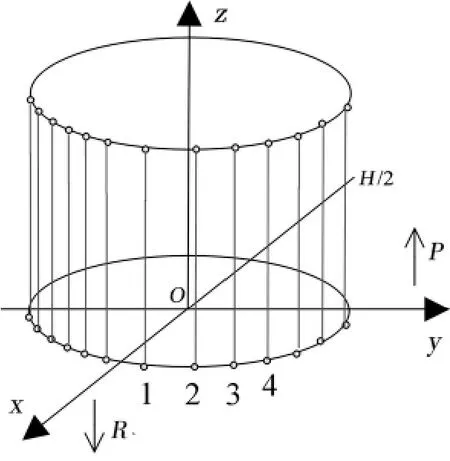
图3 圆柱阵示意图
纵摇角度P是舰船首尾线oy与水平面的夹角,舰艏抬高为正,在垂直面内测量,为铅直角。R为横摇角,甲板右舷下倾为正,在肋骨面内测量,不是铅直角[2]。

图4 两坐标系间的变换关系
当有横摇和纵摇时,我们的目标就是要计算出某向量r在大地坐标系中的坐标(x'y'z')与其在甲板坐标系的坐标(xyz)之间的对应关系。因为向量静止坐标系旋转与坐标系静止向量旋转是可以相互等效的,所以,让向量(x'y'z')在大地坐标系中先绕x’轴旋转-P,再绕y’轴旋转-R就可以得到该向量在甲板坐标系中的坐标(xyz),即:
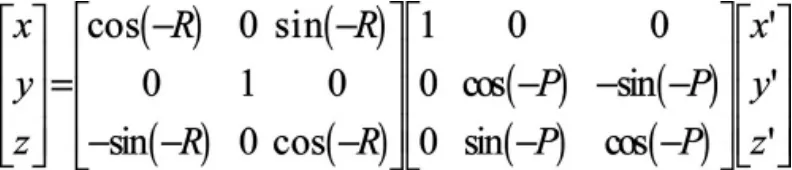
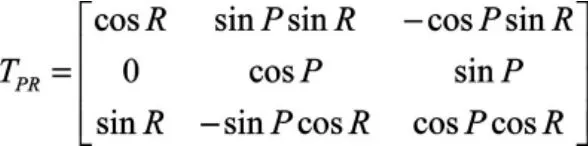
记为:

式中:
2 波束稳定与俯仰
2.1 阵元延迟计算
在大地坐标系中,假设波束的水平指向角为θ,垂直俯仰角为φ,上俯时φ>0,可以将波束方向表示为向量形式:

变换至甲板坐标系:

在甲板坐标系中,第i个阵元的空间坐标可以表示为列向量形式:,则波束形成时,该阵元对应的延迟量为[3]:

2.2 波束形成的指向性函数
为了在(φ0,θ0)方向形成波束,需要将阵元 pi的信号加以延时 τi(φ0,θ0),经过延时的信号为:

N阵元输出信号等增益求和:
得到归一化的指向性函数[4]:

3 性能仿真
假设圆柱阵在水平方向上由28个线阵构成,每个线阵上包含8个阵子,这8个阵子又在垂直方向上分为2层,即每4个阵子并联构成1个等效阵元;系统工作频率设为10 kHz,在该频率上各阵子间距满足半波长。
当俯仰角为0°时,圆柱阵二维波束形成的指向性如图5和图6所示,其中图5为D(φ,θ)的三维指向性图,图6是俯视的等高线图,波束的水平指向角为θ=30°。在水平和垂直方向上,D(φ,θ)的 3 dB 主瓣宽度分别为 9.2°和 12.6°,主旁瓣幅度比分别为3.9 dB和7.3 dB,可见,此时该圆柱阵在水平方向主瓣更窄,在垂直方向的旁瓣更低。

图5 圆柱阵的三维指向性图

图6 三维指向性的等高线图
当存在波束俯仰时,波束性能将随俯仰角的增大而下降。图7~图9描述了在不同的俯仰角下,D(φ,θ)的主瓣幅度、在垂直方向的主旁瓣幅度比和主瓣宽度的变化情况。
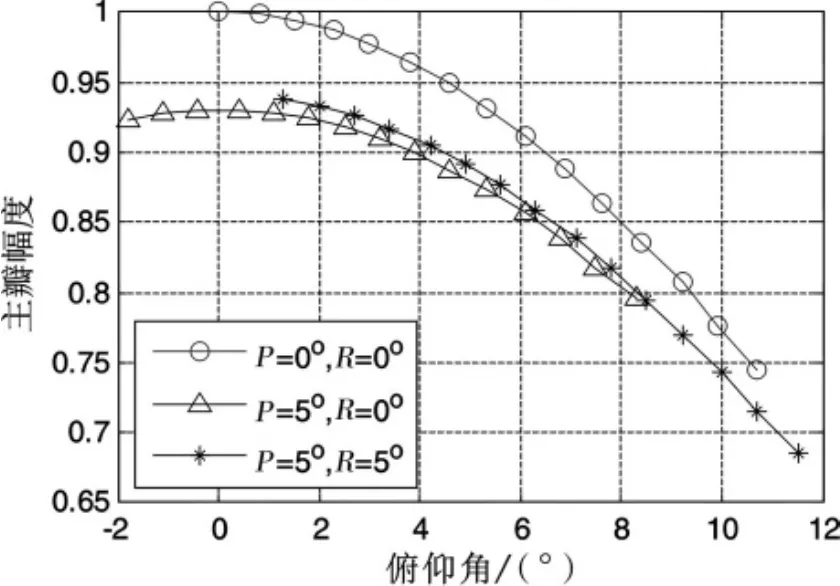
图7 主瓣幅度随俯仰角的变化曲线

图8 主旁瓣幅度比随俯仰角的变化曲线
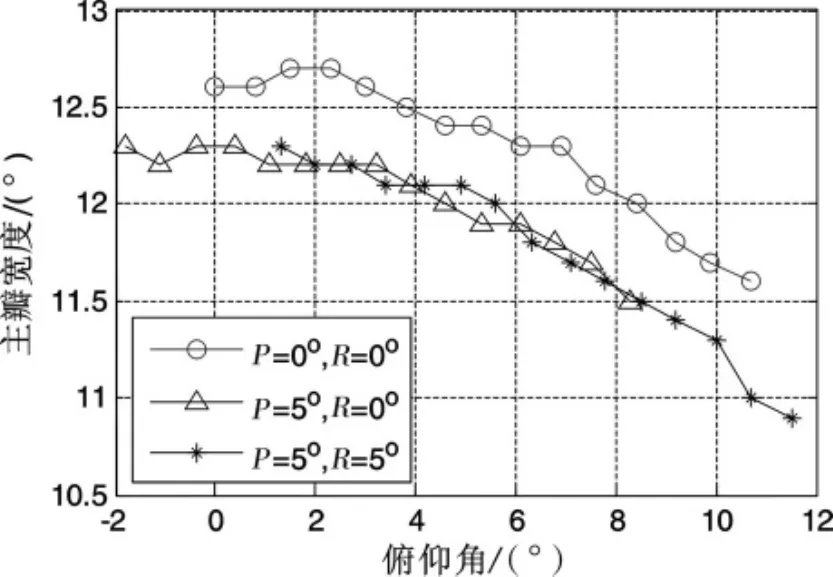
图9 主瓣宽度随俯仰角的变化曲线
波束性能下降的主要原因是垂直方向的分层特性,只有在俯仰角φ=0时,该等效二元线阵的性能才与8元线阵相当;当存在波束俯仰时,该等效振子的性能便无法达到4元线阵的效果。随着俯仰角的增大,虽然波束主瓣宽度变化不大,甚至略有改善,但主瓣高度迅速下降,主旁瓣幅度比也很快恶化,当俯仰角φ>5°时,主旁瓣幅度比即小于3 dB,当φ>11°时,旁瓣高度甚至超过了主瓣。因此,在本仿真设定的条件下,有效的波束俯仰的前提是:舰船的摇摆角要小于5°,俯仰角也要小于5°,如果要在更大的角度范围内进行俯仰,则必须对线阵进行更精细的分层,以做到能够对其上的各个阵子进行独立的延迟控制。
4 结束语
本文推导了当舰体存在摇摆时,甲板坐标系和大地坐标系之间的变换关系,从而可以对波束进行俯仰和稳定控制;并基于圆柱阵声纳,分析讨论了在不同的波束俯仰角下,圆柱阵换能器二维波束形成的性能。结果表明,当俯仰角度较小时,波束性能下降不大;当俯仰角度较大时,如果要保持较好的波束性能,则必须要在垂直方向上对各阵元进行更精细的延迟控制,亦即以较大的设备量来换取好的波束性能。目前该波束控制方法用于实际工程项目中,已经取得了良好的效果。
[1]田坛,刘国枝,孙大军.声纳技术[M].哈尔滨:哈尔滨工程大学出版社,2000:7-8.
[2]王小军,李殿璞.等.舰载三轴雷达波束稳定跟踪的研究[J].哈尔滨工程大学学报,2002,23(1):58-63.
[3]Harry L,Van Trees著,汤俊,等译.最优阵列处理技术[M].北京:清华大学出版社,2008:18-19.
[4]李启虎.数字式声纳设计原理[M].合肥:安徽教育出版社,2002:192-193.
Beam Steadying and Elevating with Shipborne Sonar
XU Xian-zhong1,ZHANG Qiu-sheng2,LIU Yun-tao2,DENG Hong-chao2
(1.Military Delegation of Navy in Wuxi District,Wuxi Jiangsu 214061,China;2.Institute of Acoustics,Chinese Academy of Science,Beijing 100190,China)
It’s necessary to steady or elevate the beam for shipborne sonar,when the ship is swayed or beam to different depth.The transformation between ground and deck coordinates is calculated.The performance of two-dimension beam forming method is discussed with different elevation based on cylinder transducer array.When the elevation is smaller,the method can achieve tolerable performance;while when the elevation is bigger,it’s essential to classify the array sensors with a more refined scale in vertical dimension.
beam steadying;beam elevating;coordinates transformation
TB565
A
1003-2029(2010)04-0059-04
2010-06-10
“十一五”预研基金资助项目(1010704020501)
徐贤忠(1968-),男,工程师,研究方向为声纳技术。
