纯电动汽车整车控制器开发的探讨
2010-01-07罗水平
罗水平
纯电动汽车整车控制器开发的探讨
罗水平
福建新龙马汽车股份有限公司
本文简单介绍纯电动汽车整车控制系统结构、整车控制器组成;并结合dSPACE开发平台说明VCU开发流程;最后对实际开发的VCU的系统构架及功能进行说明。
纯电动汽车;VCU;开发;功能
众所周知,纯电动汽车是由车载储能装置获得电力,以电机驱动的车辆。作为纯电动汽车的核心部件——整车控制器(VCU,vehicle control unit)对于纯电动车的作用犹如大脑对人的作用的关系一样至关重要。
1 整车控制系统结构
纯电动汽车整车控制系统可分为组织层、中间层、执行层,其系统分层结构如图1所示。最底层是执行层,由部件控制器和一些执行单元组成,其任务是正确执行中间层发送的指令,并且有一定的自适应和极限保护作用;中间层是协调层,其核心就是VCU,VCU一方面对驾驶员的各种操作以及车辆当前所处的状态解释出驾驶员的意图,另一方面,根据执行层当前的状态,做出最佳的协调控制;最高层是组织层,为驾驶员或自动驾驶仪。组织层、中间层、执行层三者形成闭环控制系统,来实现车辆控制。

图1 纯电动汽车分层结构控制系统
2 整车控制器组成
VCU作为纯电动汽车控制系统最核心的部件,其承担了数据交换、安全管理、驾驶员意图解释、能量流管理的任务。根据重要程度和实现次序,VCU的功能划分如图2所示。
2.1 数据交换层
该层对直接馈入整车控制器的物理量信息(如驾驶员的操作反馈的信息和其它执行部件的工作状态信息)进行采样处理,并通过I/O、D/A和PWM,提供对显示单元、继电器等的控制信号。
2.2 安全故障管理层
车辆出现故障时,故障只体现在数据交换层。在检测出故障后,该层会做出相应的处理,在保证车辆安全性的条件下,给出执行部件可供使用的范围,以尽可能满足驾驶员的驾驶意图。
2.3 驾驶员意图解释层
驾驶员的所有与驾驶操作相关的操作信号都直接进入整车控制器,整车控制器对采集的信息进行处理分析,计算出驱动系统的目标转矩和车辆行驶时的需求功率来实现驾驶员的驾驶意图。
2.4 能量流管理层
该层的主要工作是能量源之间进行需求功率分配。
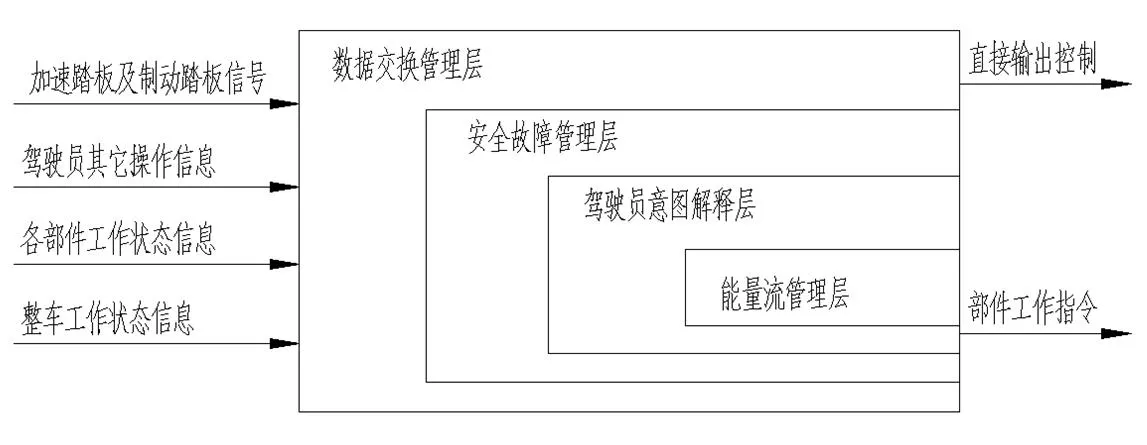
图2 VCU功能划分
3 整车控制器开发模式
要实现整车控制器数据交换、安全管理、驾驶员意图解释、能量流管理的功能,必须设计合理的硬件和软件。整车控制器开发流程主要有传统和现代两种流程。
3.1 传统开发流程
传统的开发流程通常采用串行开发模式,即①应用需求分析;②提出系统需求并进行功能定义;③硬件设计;④面向硬件的代码编写;⑤完成软硬件和外部接口集成;⑥系统进行测试和标定。
3.2 现代开发流程
VCU的开发采用先进的并行开发模式——V模式开发流程。V模式开发流程是由德国dSPACE公司提出的,基于MATLAB/Simulink的控制系统开发及半实物仿真的软硬件平台;dSPACE除了具有很强的处理和控制能力以外,更重要的是实现了和MATLAB/Simulink的无缝连接。其所带的ControlDesk可以方便地实现数据显示和在线调节控制参数。 dSPACE提出的V模式开发流程如图3所示。

图3 V模式开发流程图
第一步是功能定义和离线仿真。明确控制器应具备的功能,为硬件设计提供依据;同时借助MATLAB建立整个控制系统(含控制器和被控对象)的仿真模型,并进行离线仿真,运用软件仿真的方法设计和验证控制算法。
第二步是快速控制器原型和硬件开发。从上述控制系统的MATLAB仿真模型中单独取出控制器的模型,结合dSPACE的物理接口模块(如A/D、I/O、RS232等),来实现与被控对象的物理连接;运用dSPACE提供的编译工具生成可执行程序,并下载到dSPACE中。dSPACE此时作为目标控制器的替代物,可方便地实现控制参数的在线调试和控制逻辑调节。在进行离线仿真和快速控制器原型的同时,完成硬件的功能分析并进行硬件的设计、制作,并根据软件仿真的结果对硬件进行完善、修改。
第三步是目标代码生成。在确定了整车控制器的控制算法,并通过dSPACE进行了算法验证,同时硬件设计、制作也形成了最终实体ECU后,运用dSPACE的辅助工具TargetLink生成ECU代码,编写ECU的底层驱动程序,两者结合后,将生成的代码下载到ECU中。
第四步硬件在环仿真。其目的为验证ECU的功能。在这个环节中除电控单元是真实部件外,其它被控对象也可以是真实部件。
第五步调试和标定。把经过硬件在环仿真验证的ECU连接到完全真实的被控对象,进行实际运行验证和调试。
4 整车控制器开发
实际开发的VCU可为纯电动汽车提供四种运行模式:起动模式、前进模式、倒车模式、爬坡模式。为能满足各种不同的运行模式需求而开发的VCU,其主要组成原件ECU、VCU系统构架、VCU系统功能以及VCU的输入和输出分别介绍如下:
4.1 主要组成原件ECU
ECU采用Infineon SAK-XC2287-96FxxL型微处理器,该处理器为16位处理器,其规格如表1:
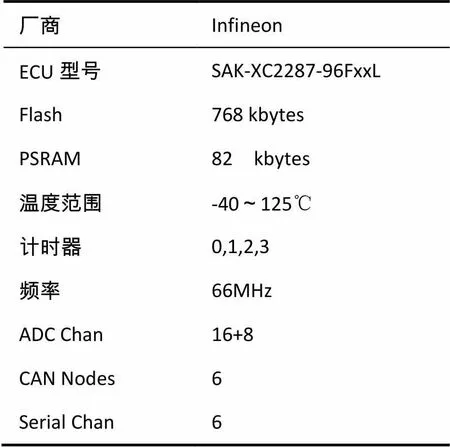
表1 微处理器规格
4.2 VCU系统构架(如图4)
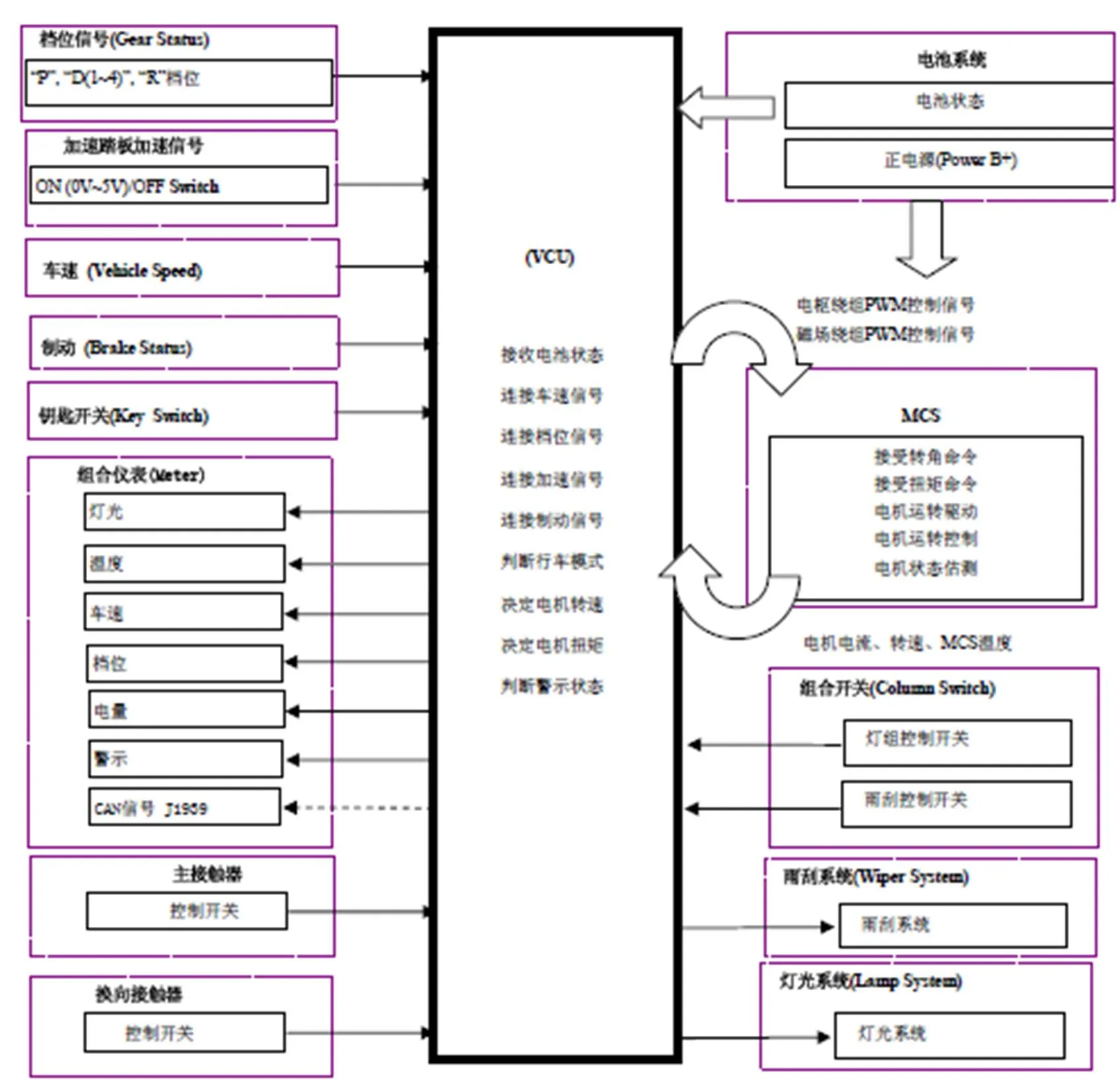
图4 VCU系统构架图
4.3 VCU系统功能(如图5)

图5 VCU系统功能
4.4 输入
(1)车速传感器 (Speed Sensor):提供车速信号,供VCU判断行车状态;
(2)加速踏板开关 (Accelerator):提供加速信号,供VCU判断行车状态;
(3)钥匙开关 (Key Switch):提供信号,告知VCU,当前钥匙开关是否起动;
(4)档位开关 (P,R,D)(Gear Switch):提供档位信号,供VCU判断行车状态及电机转速输出状态;
(5)电机控制系统 (MCS):提供电机电流信号,供VCU判断电机运转时所需的扭矩;
提供电机温度信号,供VCU判断电机是否过热;提供转速信号,供VCU判断行车状态;
(6)电池 (Battery):提供电池系统电压信号,供VCU判断电机运转时所需的电压以及判断电池系统当前的SOC;
(7)制动开关 (Brake Switch):提供当前制动信号,供VCU判断行车状态以及电机输出转速;
(8)组合开关 (Column Switch):提供灯组控制信号、雨刮控制信号、仪表显示信号,供VCU判断并发出执行指令;
(9)主接触器(Active Relay):主接触器工作时,接通主电源至MCS;
(10)换向接触器(Commutate Relay):提供信号供VCU判断并控制MCS驱动电机正(反)转;
(11)直流-直流变换器 (DC-to-DC Converter):通过直流-直流变换器,提供12电源给VCU使用。
4.5 输出
(1)组合仪表(Meter):VCU输出信号至仪表,控制仪表显示当前的行车状态,包括灯光、车速、电量、警示等;
(2)PWM输出(PWM Outputs):VCU根据当前行车状态以及驾驶员的操作动作,控制MCS驱动电机加速或减速;
(3)灯光系统(Lamp System):当组合开关有动作时,VCU驱动车辆行驶时所需的左/右转向、远/近光、雾灯等灯光工作;
(4)雨刮系统(Wiper System):当组合开关有动作时,VCU发出指令驱动车辆的雨刮系统工作;
(5)通讯(Communication):VCU通过UART串列传输,作为VCU数据采集与性能调校;CAN(J1939)作为VCU与仪表进行信号通讯的管道。
4.6 实体图
图6 为新开发的VCU实体;图7为搭载新新开发的VCU的纯电动微型载货车。

图6 VCU 实体图

图7 纯电动微型载货车
5 结语
本公司针对某型号纯电动微型载货车开发的VCU在实车上做匹配性试验。实践证明,搭载该VCU时,车辆的动力性能、驾驶舒适性以及整车的协调控制性等均达到预期的目的。从成本方面考虑,该型号VCU成本也控制在预期目标中。VCU开发是成功的。
[1] 陈全世,仇斌,谢起成,等.燃料电池电动汽车[M].北京:清华大学出版社, 2005.
[2] 胡骅,宋慧.电动汽车[M].北京:人民交通出版社,2006.
Discussion on Developement for VCU of Pure Electric Vehicle
Luo Shuiping
(Fujian New longma Motor CO.,Ltd , Longyan Fujian ,364000)
This paper briefly describes the structure of vehicle control System, VCU layering structure, and describes the develop process of VCU based on dSPACE platform. Finally, introduces the system frame and functions of VCU.
Pure electric vehicle VCU Development Function
