面向深空探测任务的飞控仿真与支持系统研究
2009-12-12袁利,程铭
袁 利,程 铭
(北京控制工程研究所,北京100190)
面向深空探测任务的飞控仿真与支持系统研究
袁 利,程 铭
(北京控制工程研究所,北京100190)
为确保深空探测航天器飞行控制准确无误,故障措施应对及时,在进行需求分析的基础上,提出一种飞控仿真与支持系统的总体框架,给出系统工作流程,并总结出高精度轨道和姿态仿真、故障模拟与注入等5个方面的技术特点,最后通过对比仿真结果和在轨飞行结果验证了该系统的有效性并提出了展望.
航天器;飞控仿真与支持系统;深空探测
航天器工程是一项高风险、高投入、高度复杂的系统工程,在研制过程中,仿真不可或缺.根据仿真的不同特点,大致可分为方案设计仿真、系统性能验证仿真和故障对策仿真3种类型[1].由于航天器在其飞行测控过程中的高风险,要求测控操作准确无误,故障措施应对及时.欧美的航天部门就特别注重卫星模拟器和航天器飞行支持与控制系统的开发,旨在加强地面仿真验证、飞行程序验证和人员的培训,支持航天器飞控任务操作[2-3].
欧空局(ESA)广泛应用一种可配置的模拟器(框架)工具EuroSim,其主要功能是构建可配置的模拟器,以实现数字仿真.伽马射线观测器(GRO)的控制中心开发了两个工具——备用控制模式分析与应用系统(BCAUS)和专家系统预报器(ESP),这是为确定星上控制系统模式故障切换原因而采用的神经网络和专家系统诊断工具.BCAUS通过分析遥测值的发展趋势来开始其诊断过程.ESA下属的欧洲航天测控中心(ESOC)及欧洲空间研究和技术中心(ESTEC)以探测彗星内核的科学卫星ROSETTA任务为应用背景定义了一种方法,即把为中央检测系统开发的结果再用于飞行控制系统.后来,ESA的其他科学卫星如火星快车(Mars Express)任务[4-6]也沿用了这种方法.通信链路专家辅助对策系统(CLEAR)是用于诊断宇宙背景探测者(COBE)与跟踪和数据中继卫星(TDRS)间通信链路故障的专家系统,这是在戈达德空间飞行中心运行的第一个实时专家系统,它隔离了COBE飞行过程中发生的67个不同的故障,并可执行故障诊断和分析.美国Integral Systems公司开发的仿真支持系统EPOCH 2000配有趋势分析软件EPOCH ABE,可支持飞行任务测控操作.
执行月球、火星探测等深空探测任务的航天器不同于地球轨道航天器,其飞行距离极长,环境未知性较强,飞行过程复杂,飞行风险大.比如月球探测[7],要使航天器从环绕地球的飞行轨道转移到环月飞行轨道,需经历多次复杂的轨道和姿态机动,要求控制精度高,实时性强,往往具有控制窗口唯一的特点,因此这类航天器较常规地球卫星有较大的飞行风险.所以必须根据航天器的实际运行状态,针对飞行过程中的重大测控事件进行地面仿真验证.中国已开发了基于虚拟航天器技术的各种卫星模拟器,并取得了较好的效果,但对航天器飞控仿真与支持系统的研发还处于探索阶段.航天器飞控仿真与支持技术是一门综合技术,汇集了航天器测控技术、仿真技术和计算机技术等,但是目前对其还没有一个统一的定义和框架.本文以深空探测任务为对象,提出一种面向深空探测航天器的飞控仿真与支持系统总体方案,归纳和阐述了该系统的相关技术特点,最后以对比仿真结果和在轨飞行结果的方式给出应用实例并针对后续研究进行了展望.
1 系统定义与需求分析
在航天器设计和开发过程中,要进行基于数学模型的系统方案验证和设计参数优选,控制算法用软件实现后要进行软件的确认测试,而航天器硬件产品通过验收测试后则要进行系统集成,再进行系统的功能和性能检验测试.在飞控准备阶段,地面测控系统要利用卫星模拟器替代真实卫星进行各分系统间接口的功能验证和测控人员的相关培训.以往的航天器在其在轨飞行过程中,通常严格按照预定的飞控程序运行,鲜有对飞控程序进行再验证的情况;一旦发生故障,则需要较长的处理时间.由于深空探测航天器的飞行过程复杂,环境未知因素多,对测控操作的可靠性要求高,因此在整个飞控过程中需要及时而有效地进行地面分析和验证.飞控仿真与支持系统就是以飞控事件的工作程序为核心,针对飞控任务的具体实施和灵活处理、在轨故障的快速分析和对策、控制参数和指令序列的正确制定而开展仿真验证工作的地面支持系统.
飞控仿真与支持系统的任务和应用需求体现在以下几个方面:
1)任务前的准备阶段,针对发射前航天器的状态,按照飞控程序进行试验,保证飞控操作的正确性,事前对故障对策进行检验,必要时根据试验结果进一步改进飞控程序和故障对策.这也是对飞控程序的演练和对仿真与支持系统的验证;
2)任务执行过程中,在执行主要事件前,要结合最新遥测得到的航天器状态检验实施飞控的指令和参数是否正确,检查模拟飞行状态与预期目标状态是否一致,分析和判断不一致性的原因,做到心中有数;
3)任务执行过程中,在执行事件完成后,分析事件的结果和后果,发现和定位问题,特别是要分析影响轨控精度的原因,为执行下次轨控事件提供修正措施;
4)根据需要,以真实的星上物理设备和真实的时序尽可能真实地模拟航天器在轨飞行过程中的某些特定状态和事件,以获取更充分的信息,通过相关的数据全面检查星上系统的状态;
5)为测控人员提供必要的软件支持工具,提高飞控的时效性和准确性.
2 总体框架与工作流程
基于以上任务需求,提出一种面向深空探测航天器的飞控仿真与支持系统,如图1所示,它由以下4个子系统构成.
(1)数字快速仿真子系统
这是实现飞行控制仿真验证的前端部分.该子系统利用全数字环境,通过软件实现航天器姿态与轨道动力学,制导、导航与控制及有关分系统的模拟,通过对外部接口的模拟实现外部事件驱动.它可以对航天器真实飞行状态或假想飞行状态进行快速仿真,模拟航天器的姿态及所受的空间力学环境干扰和各种控制模式,以达到事件预测和事后分析的目的.借助该子系统能够快速准确地进行轨控策略复核和故障对策验证.
(2)控制器实时仿真子系统
它采用真实的星上控制器及控制软件,利用地面高性能计算机模拟航天器动力学和运动状态,建立动态的闭环系统,检验或评估星上控制软件的工作状态和结果.控制软件的工作状态与航天器在轨飞行状态在时序和指令链方面应完全一致,这是实现飞行仿真验证的后端部分,它可以仿真验证与控制软件相关的所有问题,包括在轨维护.
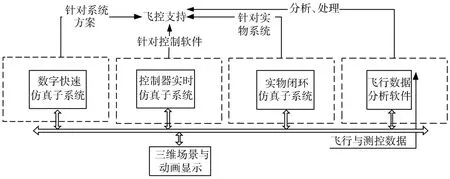
图1 飞控仿真与支持系统框图
(3)实物闭环仿真子系统
实物闭环仿真子系统采用半实物仿真环境,尽可能采用真实的星上软、硬件产品.星上敏感器输入采用数字信号激励,星体动力学由地面计算机进行仿真和计算,形成闭路实时系统.该仿真系统的运行状态与航天器在轨飞行状态在时序、指令链和部件协调性等方面完全一致,这是实现飞行仿真验证的核心部分,它可按1∶1的时序全方位模拟和重现星上状态.
(4)飞行数据分析软件
飞行数据分析软件以支持飞控任务为目标,基于组合计算和相关性统计等方法,对航天器下行数据进行解包、分类和后处理,形成可供飞控人员和专家进行快速分析和判断的数据图形界面和结果.
为确保飞控实施准确无误,飞控仿真与支持系统从构成、使用和演示方法以及仿真范畴入手,实现全方位、多角度的仿真验证与支持.
飞行数据分析软件从测控网接收航天器的在轨遥测原始数据,经整理和分析后得出相关的信息和状态,再将这些信息分发给数字快速仿真子系统、实物闭环仿真子系统和控制器实时仿真子系统,这3个子系统针对同一飞控策略和参数同时启动仿真过程,按时间顺序先后提供仿真结果.根据3个子系统输出的仿真结果,可从不同角度和层次验证飞控策略和参数.此外,根据飞控任务实施的轻重缓急,可以在不同的时间节点给出验证结果,作为现场决策的依据.图2表示利用飞控仿真与支持系统对航天器在Δt时间前在轨发生的意外现象和事件进行仿真验证的基本工作流程示意图.图3表示利用飞控仿真与支持系统对航天器在Δt时间后将发生的事件进行预示仿真验证的基本工作流程示意图.
3 主要技术特点
(1)高精度轨道和姿态仿真技术
深空探测航天器在轨飞行复杂,要求高精度测控,同时面临不确定的深空环境,飞行风险高.因此,在飞控仿真与支持系统中,要针对不同飞行阶段建立相应的动力学模型.建议用RKF7(8)方法,考虑高阶摄动,采用高精度轨道算法精确计算各个阶段的轨道动力学模型和轨控策略(包括应急控制策略),复核测控系统拟实施的轨控参数.此外,在飞控仿真与支持系统中必须考虑深空探测航天器姿态控制与轨道机动相耦合的特点.姿控推力器点火工作以及动量轮的喷气卸载都会对轨道产生影响,因此将姿态控制推力器工作时产生的干扰力矩实时引入轨道仿真中,可以有效提高轨道仿真的精度.大推力轨控发动机工作时的推力偏心也必然会影响姿态稳定性,将星上轨控发动机点火时产生的姿态扰动力矩实时引入姿态动力学仿真中,就可更真实地仿真航天器轨道机动过程中的姿态运动.采用姿态与轨道耦合仿真可以实现仿真状态与在轨状态的高度一致性.
(2)故障模拟与注入技术
由于深空探测航天器往往执行探索性任务,技术新,环境不确知,因此飞行过程中出现意想不到的故障概率较大.为确保任务前飞控演练充分到位,对飞控过程中的故障模式应对及时且准确无误,飞控仿真与支持系统必须具有完善的故障仿真功能和手段以及灵活的故障注入接口和完善的故障模型.在可实现的故障模型中,不仅要考虑硬件故障,还要通过引入广义干扰模型考虑灰色故障,如光学敏感器受天体的杂光干扰的模型.可以根据仿真需要对各种扰动进行仿真.在故障注入手段方面,可通过设计故障注入模拟器以及采用工业组态软件技术,实现故障干扰在线注入和故障实时模拟的功能.

图2 对Δt时间前在轨发生的意外现象和事件进行仿真验证的基本流程示意图

图3 对Δt时间后将发生的事件进行预示仿真验证的基本工作流程示意图
(3)地面实物系统1∶1跟飞技术
在仿真环境中采用星上真实部件,并采用与在轨飞行系统1∶1比例的时间序列.地面仿真系统不仅要对飞行状态进行星-地同步运行,还要对飞行事件进行超前“预演”和滞后“复现”,使其仿真结果与飞行状态具有高度的可对比性和直观可视性.在对航天器的在轨模拟飞行中,地面实物系统以1∶1比例尺对在轨飞行状态进行长时间飞行任务模拟,这需要采用信息提取和注入方法,并设计跳时流程以实现飞行断点状态恢复.还要采用分段仿真、跳时仿真、加速仿真等手段,并设计跳时时段与非跳时时段的姿态和轨道平滑衔接算法,使实时仿真与加速仿真无缝连接,这是实现航天器在轨飞行状态预测、故障复现和定位的理想技术手段和方法.
(4)可视化仿真环境与演示技术
航天器在深空飞行过程中,其姿态与太阳、地球和月球的几何关系变化大,且天体运动对航天器的姿态和轨道运动有显著影响.为了直观地描述航天器的轨道、姿态及其与日-地-月的相互关系,特别是反映姿态控制和轨道机动过程中的情景,需要将仿真计算的结果以三维可视化的形式显示.一种可行的技术途径是,集成开发仿真系统中的各类专业软件,以及仿真系统与三维图形显示软件的通用数据接口,使仿真结果以实时数据流或数据文件的形式驱动三维图形显示工具,这样可以实时显示航天器的轨道、姿态及其空间环境的三维场景.采用通用的数据接口,实物仿真或数学仿真均可与三维图形显示工具对接,从而大大提高仿真过程和结果的可视化程度.
(5)在轨数据快速分析与评价技术
航天器在轨飞行时,地面唯一“可见”的就是航天器下传的遥测数据.开发的飞行数据分析软件、组合计算软件等软件包,对航天器下行数据进行准实时解包、分类和后处理,形成可供测控人员和专家进行快速分析和判断的数据界面和数据结果,如多种姿态敏感器数据相关性比较,航天器姿态与能源输出的综合分析,推进系统的在轨实时标定等.基于遥测数据,可以实现航天器在轨状态的快速分析,及时评价其运行状态.在上述基础上,可引入故障诊断专家系统,进一步提高对航天器的在轨判断和决策支持等能力.
4 在嫦娥一号卫星中的应用
2007年11月中国研制的绕月探测卫星嫦娥一号成功实现绕月飞行,成为了中国航天技术发展的第3个里程碑.在嫦娥一号实现奔月、绕月飞行过程中,本文研究的首个飞控仿真与支持系统实现了如下功能:
1)对7次变轨和奔月中途轨道修正等重大飞控事件的事前仿真验证.正确地预示了在轨控过程中将会发生的现象和结果,大大降低了任务实施的风险;
2)轨控策略的复核和复算.确保轨道控制精准,将预先安排的3次中途轨道修正控制减少到一次,节省了推进剂;
3)飞控实施指令和参数的检验.实现了飞控实施零差错;
4)飞行遥测数据的处理和分析.有效提高了飞控仿真过程和飞控准备过程的效率和准确性;
5)在轨测试阶段飞行参数的地面验证.为长期稳定运行提供了仿真验证基础.
以下列举两次具体应用中的实例.
1)2008年8月18日嫦娥一号卫星在经历月食后建立环月姿态,进入环月模式.飞控仿真与支持系统对整个环月姿态的建立过程进行了仿真.其中恒星定向时间、惯性调姿时间和环月定向时间3个关键时间点的仿真结果与实际飞行结果对比情况见表1.

表1 环月姿态建立过程的仿真与飞行情况的对比结果
可以看到,仿真结果很好地反映了关键飞行事件的时间点,误差可以达到秒量级.
2)2008年8月,嫦娥一号卫星进行了第3次轨道维持,使卫星保持在200 km的使命轨道上.在嫦娥一号卫星第3次轨道维持之前,飞控仿真与支持系统对第3次轨道维持的控制策略和飞行参数进行了全面仿真,部分典型参数的仿真结果与实际飞行结果对比情况如图4~9所示.

图4 姿态四元数仿真结果
从对比情况可以看出,仿真结果真实的反映了卫星实际飞行状态,控制策略和飞行参数得到了很好的验证.

图5 姿态四元数在轨飞行结果
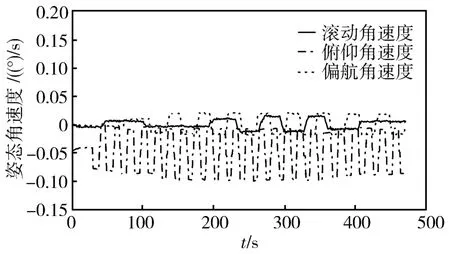
图6 姿态角速度仿真结果

图7 姿态角速度在轨飞行结果

图8 点火时长、速度增量仿真结果
5 结束语

图9 点火时长、速度增量在轨飞行结果
中国航天器飞控仿真与支持技术研究及系统开发当前还处于起步阶段,面向深空探测任务的飞控仿真与支持系统技术在嫦娥一号卫星飞控过程中发挥了重要作用,有力地推动了中国在飞控仿真与支持技术方面的创新和探索,但是与欧美航天大国还有较大差距,特别是在总体框架设计、故障诊断技术的应用、分布式交互仿真和操作灵活性等方面还有待进一步研究和完善.通过对飞控仿真与支持技术的深入研究和不断完善,必将使其在中国后续深空探测任务中发挥越来越大的作用.
[1] 刘良栋.卫星控制系统仿真技术[M].北京:宇航出版社,2003
[2] Korsmeyer D J,Smith E.App lications of intelligent systems for advanced mission operations[C].Space Ops 2008 Conference,Heidelberg,Germany,May 12-16,2008
[3] Timmermans L J,Zwartbol T,Oving B A,et al.From simulations to operations:developments in test and verification equipment for spacecraft[R].NLR-TP-2001-323,2001
[4] Silberberg D,Gomez M.A standard and knowledge-based approach to spacecraftmodeling and simulation[C].Twenty-first Space Simulation Conference,Annapolis,Maryland,October 23-26,2000
[5] Dupas B.Low cost ground systems for the spacecraft lifecycle[C].The EGSE Workshop at ESTEC,Labege,France,February 2003
[6] Bodin P,Berges,Edfors A,et al.Development,test and flight of the SMART-1 attitude and orbit control system[C].AIAA Guidance,Navigation and Control Conference and Exhibit,San Francisco,California,August 15-18,2005
[7] 叶培健,孙泽洲,饶伟.嫦娥一号月球探测卫星研制综述[J].航天器工程,2007,16(6):9-15
Deep Space Exploration Mission-Oriented Flight Control Simu lation and Support System
YUAN Li,CHENG Ming
(Beijing Institute of Control Engineering,Beijing 100190,China)
To ensure accurate and flaw less flight and timely actuation of failure-safety measures for deep space exp loration spacecrafts,a flight control simulation and support system is proposed.Based on the requirement analysis,a frame scheme diagram and a work flow chart are depicted.Five technical features including high accuracy attitude and orbit simulation,failure simulation and injection etc.are described.The effectiveness of the system is verified by comparing the simulation result and the result of in-orbit flying.Finally the prospect of further development is presented.
spacecraft;flight control simulation and support system;deep space exploration

V448.2
A
1674-1579(2009)06-0013-06
2008-12-10
袁 利(1974—),男,湖南人,高级工程师,研究方向为航天器控制系统设计与测试(e-mail:yuanli@spacechina.com).
