基于SPCE061A单片机无线语音控制的智能玩具车硬件设计
2009-12-11刘冬朱莉佳许斌
刘 冬 朱莉佳 许 斌

摘要 介绍一种无线语音控制的智能玩具车系统的硬件设计。该系统以SPCE061A单片机为检测和控制核心,对语音信号进行实时检测、处理和识别,并通过无线语音输入模块实现对玩具车的无线语音控制,通过红外光电传感器实现自动避障。反复试验表明,本系统语音信号识别准确率高,控制效果好,性能稳定。
关键词 SPCE061A;无线语音控制;语音识别;智能避障
中图分类号:TP368.1 文献标识码:B 文章编号:1671-489X(2009)27-0081-02
Hardware Circuit Design for Wireless Voice Controlled Intelligent Toy Car based on SPCE061A//Liu Dong, Zhu Lijia, Xu Bin
Abstract The hardware circuit design for a wireless voice controlled intelligent toy car is introduced. The SPCE061A is the examination and control core of the system, which can detect process and recognize real-time voice single, and by wireless transmission way, this system can be wireless voice controlled. By applying infrared-photoelectric sensor, the system can avoid the obstacles automatically. The system is tested again and again through an experimental circuit and shows its high accuracy of speech recognition, good effect of controlling, stable and reliable.
Key words SPCE061A; wireless voice control; voice recognition; intelligently avoiding obstacle
Authors address Department of Information Technology, Huazhong Normal University, Wuhan, 430079, China
随着社会的不断进步,科学技术的不断发展,面向智能化方向的科学技术更成为当代社会的重要科学。智能机器人融合机械、电子、传感器、计算机硬件、软件、人工智能等众多学科的知识,在工业生产、勘探、人性化服务等方面发挥越来越重要的作用。随着机器人产业的发展和面临的挑战以及自动化程度的进一步提高,已对机器人功能提出许多新的更高的要求。但智能机器人是个系统工程,它的研发在技术层面的难度和规模都比较大,在短期内普及使用的可能性较小。而具有初步机器人功能的智能玩具以其体积小、价格较低、功能强大、娱乐性强等特点,加之开发难度相对较低,而具有广阔的市场需求。智能化已成为玩具行业的新趋势,让语音技术融入玩具中,不仅可以赋予玩具“听”“说”的交流能力,使其更加生动、智能,还有利于在儿童中普及现代科学技术,推动语音技术产业化的发展。本文采用SPCE061A为智能小车的核心,利用SPCE061A自身的语音特色和丰富资源,给出无线语音控制的智能玩具车的硬件设计方案。
1 无线语音玩具车系统介绍和总体框架
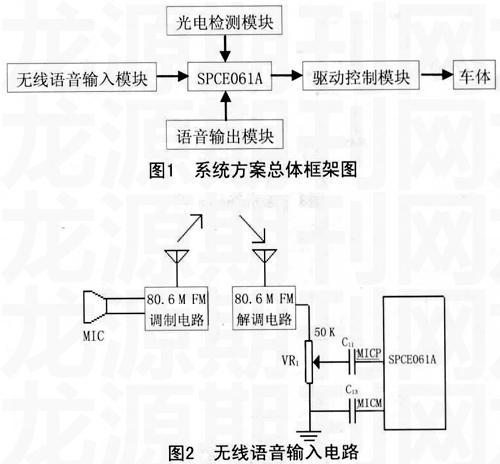
这是一个嵌入式语音识别系统和一个电动小车控制系统合成设计方案。系统的硬件主要由无线语音输入模块、语音输出模块、SPCE061A单片机、光电检测模块、驱动控制模块以及车模组成。图1为系统方案总体框架图。
用户通过无线话筒输入语音命令,语音信号经过FM调制器后发送出去,被小车上的FM接收器接收,再经过解调还原出语音命令。SPCE061A根据语音命令对小车的运动状态进行调整;设在车体两旁的红外线传感器不断检测行进过程中是否有障碍物,并根据接收的反射信号调整小车的运动方向。通过这2种手段实现小车的智能避障,使小车能够适应更加复杂的环境。小车在进行运动状态调整时会播放相应的录音,从而增强整个智能玩具车系统的交互性。
2 无线语音玩具车系统硬件设计
2.1 无线语音输入模块SPCE061A单片机具有声音模数转换通道,内置麦克风放大电路和自动增益控制电路。为了实现本系统的智能避障功能,使系统适应更加复杂的环境,所以采用无线输入语音信号的方式。这样也可以避免环境噪音对语音识别效率的影响。语音信号发送部分采用中心频率为80.6 M的调频方案,利用KS8803 FM调制芯片,采用晶振锁相技术,可以满足语音调制的良好线性要求。语音接收部分采用中心频率为80.6 M的语音调频解调方案,采用CXA1691BM FM解调芯片,利用晶振锁相技术,使其能够准确对准80.6 M中心频率,解调后可以降低信号噪音,保持语音信号的质量。FM接收器输出的语音信号经过VR1衰减后通过C11、C13进入SPCE061A的MIC端口。可以通过调整VR1,使语音信号电平与SPCE061A的MIC端口电平匹配。电路图如图2所示。
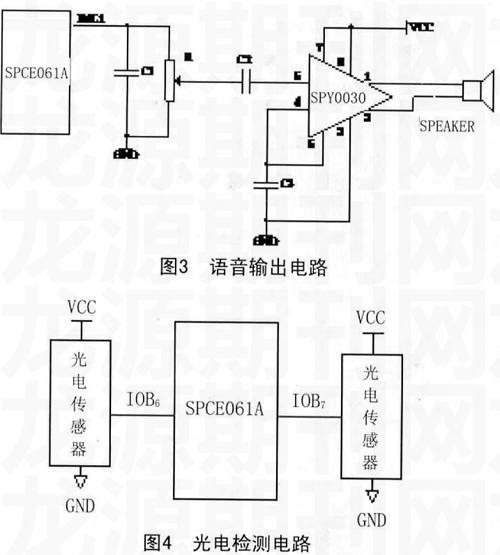
2.2 语音输出模块播放录音时,数字语音信号通过内置DAC转换成模拟语音信号输出,模拟语音信号经过音频集成放大器SPY0030,再驱动扬声器播放录音。扬声器的音量可以通过R9调节。电路图如图3所示。
2.3 光电检测部分如图4所示,本系统采用2个型号为GY10-W3-3E1光电传感器分设在车体两侧,接入SPCE061A的IOB6、IOB7,分别检测车体前左、前右方向是否有障碍物。当有反射信号时,即前方出现障碍物,传感器输出低电平;反之,则输出高电平。这样,SPCE061A通过判断IOB6、IOB7端口电平的高低就可判断前方是否有障碍物,进而采取相应避障动作。
2.4 驱动控制部分车体为4轮结构,前面2轮由前轮电机控制,在连接杆和支点的作用下控制小车的前进方向;后面2轮由后轮电机控制,为小车提供动力,控制小车的前进和后退。电机驱动电路使用H桥式功率驱动电路,电路图如图5所示。以后轮驱动为例,Q3、Q4、Q5、Q6组成4个桥臂,Q3和Q6导通时控制电机正转,Q4和Q5导通时控制电机反转。SPCE061A的IOB11和IOB10控制前轮的左右方向,IOB9和IOB8控制后轮的前进和后退。
3 结束语
本文所叙述的基于SPCE061A的无线语音控制系统,经过多次试验证明,系统便于控制,稳定性高,实现无线语音控制、智能避障、人车互动等目标。无线语音控制可以克服环境噪音对语音命令的影响,控制更容易准确,也使得语音识别率大大提高,因此系统具有更强的适应能力。然而电机与无线调制都有各自供电部分,使整个系统的电源模块比较复杂,还需要以后进一步改进。小车避障虽然采用语音控制和光电检测相结合的方法,但是避障动作较为简单,还不能够做到绕、跨、越等动作,还需要进一步的拓展。由于SPCE061A的成本低,研制出的智能小车(图6)性价比较高,有较高推广价值,如可以进一步产品化,会带来一定的经济和社会效益。
参考文献
[1]李晶皎.嵌入式语音技术及凌阳16位单片机应用[M].北京:北京航空航天大学出版社,2003
[2]罗亚非.凌阳16位单片机应用基础[M].北京:北京航空航天大学出版社,2005
[3]雷思孝.单片机原理及实用技术——凌阳16位单片机原理及应用[J].西安:电子科技大学出版社,2004
[4]赵子婴,崔剑,陈小麟.SPCE061A微控制器在单片机语音实验中的应用[J].实验室研究与探索,2004,23(1):15-19
[5]叶新华.SPEC500A在语音遥控器中的应用[J].郑州轻工业学院学报:自然科学版,2002,17(2):62-66
[6]刘科斌,韩佳玲,李国宾.监控系统的语音识别与语音提示[J].辽宁师专学报,2002,4(3):19-20,80
