四自由度气动机械手及其控制系统的设计
2009-07-21林梓九
林梓九
一、机械手电气控制系统的设计概述
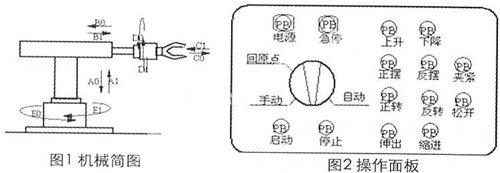
机械手主要由手指、手腕、手臂等运动部件组成,其结构见图1。它有手臂升降气缸A、手臂伸缩气缸B、夹紧气缸C、手腕回转气缸D、手臂摆动气缸E气动元件及辅助元件。其工作方式的选择可以很方便地在操作板上表示出来,如图2。
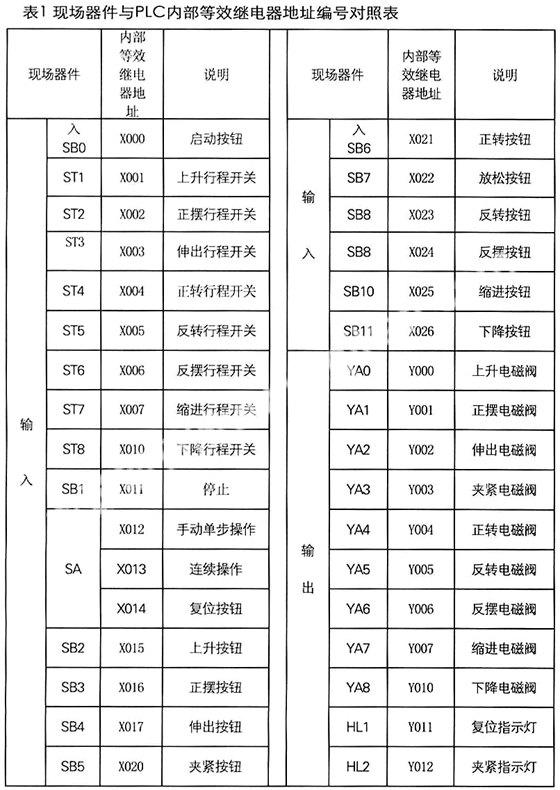
1.现场器件与PLC内部等效继电器地址编号对照表(见表1)
2.动作顺序执行表
该机械手的控制要求:手动启动后,能从第一个动作开始自动延续到最后一个动作,动作顺序见表2。

3.可编程控制器的选型
由系统的输入输出选择可知,输入信号全部为开关量以“三菱”FX0N-40MR型可编程控制器为例,其输入点为24点,输出点为16点,继电器输出方式,电源为AC100~240V,50/60HZ,可直接采用原控制电源AC 24V,满足要求。
二、程序设计
1.系统的组成
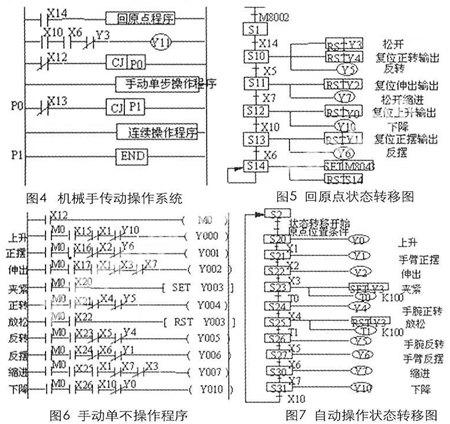
操作系统包括回原点程序 、手动单步操作程序和连续操作程序,如图4。
(1)回原位程序如图 5所示。用S10~S14作回零操作元件。应注意,当用S10~S19作回零操作时,在最后状态中在自我复位前应使特殊继电器M8043置1。
(2)手动单步操作程序如图6 所示。
(3)自动操作程序如图7所示。当机械手处于原位时,按启动X0接通,状态转移到S20,驱动上升Y0,当到达上限位使行程开关X1接通,状态转移到S21,而S20自动复位。S21驱动Y1手臂正摆,当到达正摆限位使行程开关X2接通,状态转移到S22,驱动Y2手臂伸出,当到达伸出限位使行程开关X3接通,状态转移到S23,驱动Y3置位夹紧,延时1秒,以使电磁力达到最大夹紧力,同时夹紧指示灯亮。当T0接通,状态转移到S24,驱动Y4手腕正转,当转到正转限位,X4接通,状态转移到S25, 驱动Y3复位放松,夹紧指示灯灭,电磁力放松,为了使电磁力完全失掉,延时1秒。延时时间到,T1接通,状态转移到S26,驱动Y5手腕反转, X5接通,状态转移到S27,驱动Y5 手臂反摆。X6接通,状态转移到S30 驱动Y7缩进,X7接通,状态转移到S31驱动Y10下降, X10接通,返回初始状态。
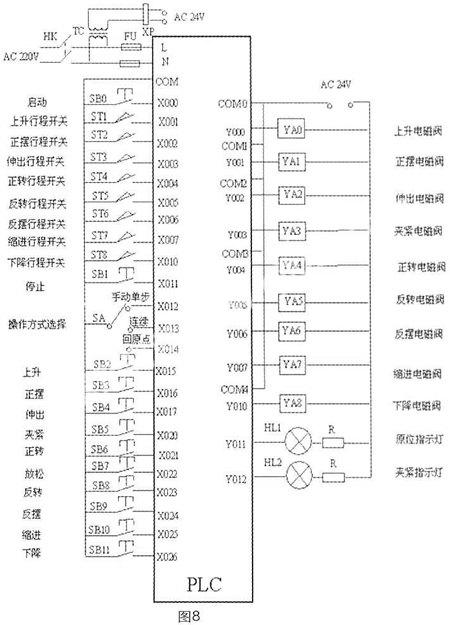
2.PLC与现场器件的实际安装接线图
(I/O 端口分配接线图见图8)
(作者单位:广东省工业高级技工学校)