船用锅炉汽包水位模糊控制研究
2009-04-08董海运
董海运 肖 航
海军工程大学船舶与动力学院,湖北武汉430033
船用锅炉汽包水位模糊控制研究
董海运 肖 航
海军工程大学船舶与动力学院,湖北武汉430033
传统的锅炉汽包水位单回路PID控制方案,无法克服汽包蒸汽流量扰动的影响。文章提出带模糊监督的控制方案,扰动经模糊处理后作为前馈控制信号,通过引入监督控制环节自动调整前馈控制和反馈控制的权重,以实现控制目标。以船用锅炉汽包水位控制为对象,采用上述控制方法实现锅炉汽包水位的模糊双冲量控制。经计算机和热态仿真,表明系统超调量较小,有较好的有效性和实用性,证明所采用的控制方案是可行的。
锅炉;汽包水位;模糊控制
1 引言
锅炉水位自动控制即控制给水泵的启停或给水阀的开度,从而控制给水量,使锅炉的给水量与蒸发量相当,以适应锅炉负荷的变化[1]。锅炉水位高会导致蒸汽带水进入过热器并在过热管内结垢,影响传热效率,结垢严重时将引起过热器爆管;水位过低又将破坏部分水冷壁的水循环,引起水冷壁局部过热而爆管[2]。目前,常用的汽包水位控制方案是在传统的单回路PID控制的基础上,引入前馈控制环节,构成汽包水位前馈—反馈控制系统,其前馈通道的传递函数仅简单地采用纯比例环节,无法克服汽包蒸汽流量扰动[3]。针对船用锅炉水位这类具有可测外部扰动的对象,可以运用带有模糊前馈控制的思想[4],将可测扰动引入控制系统,经模糊处理后作为前馈控制信号,通过引入监督控制环节,从而自动调整前馈控制作用和反馈控制作用的权重,以达到理想的控制效果。
2 船用锅炉汽包水位控制模型
锅炉给水调节对象如图1所示。汽包的流入量Dw由给水调节机构控制,而流出量为汽轮机的耗汽量Dg,汽包的水位H不仅反映其流入量和流出量间的平衡关系,而且还受液面下气泡体积的影响。因为在水循环系统中充满带有大量蒸汽气泡的水,由于某种原因使蒸汽气泡的体积发生变化,即使汽包的流入量和流出量均未变化,水位也会改变[5]。气泡的体积受汽包压力和炉膛热负荷的影响。因此,水体作为调节对象,其扰动主要有两个方面:
1)给水流量Dw,它是调节量,即基本扰动;
2)蒸汽量Dg,主要的外部扰动。

图1 锅炉给水调节对象
以下分析采用线性化模型。
假设给水流量Dw作阶跃变化,如果仅考虑流入量和流出量的平衡关系,则它近似相当于一个积分环节,但由于预热后给水的温度大大低于汽包内的饱和水温度,当“冷”水进入汽包后,吸收了原有的饱和水中的一部分热量,使锅炉的蒸汽产量下降,液面下的气泡体积减小,使水位下降。综合起来,在给水流量Dw扰动下汽包水位H的传递函数可表示为:

蒸汽流量Dg扰动主要来自汽轮机负荷的变化,它是调节系统的外扰。在蒸汽流量Dg的阶跃扰动下,单从汽包流入量和流出量的平衡关系考虑,Dg的阶跃增加将使水位H直线下降,但Dg的增加,使汽包压力下降,液面下气泡膨胀,其体积的增加导致水位升高。这种升高称为 “虚假水位”[6-7]。综合考虑,在蒸汽流量Dg扰动下汽包水位H的传递函数可表示为:

式中,τ为延迟时间,s;n为阶数;ε为反应速度,mm/s;KD为放大系数;TD为时间常数,s。
汽包水位控制对象的简化模型如图2所示。
3 模糊控制方案设计
在锅炉汽包水位控制中,模糊控制是主要控制策略之一,模糊控制是以模糊集合论、模糊语言变量及模糊逻辑理论为基础的一类计算机数字控制方法[8-10]。

图2 汽包水位控制对象简化模型
仿效传统控制方法中的双冲量控制,构建模糊前馈—反馈控制系统,如图3所示。由图3可以看出该控制系统包括3个控制器:模糊反馈控制器C1、模糊前馈控制器C2和监督控制器C3;其中,模糊控制器C1和C2组成了前馈—反馈控制,而C3的引入目的是抑制“虚假水位”的影响。
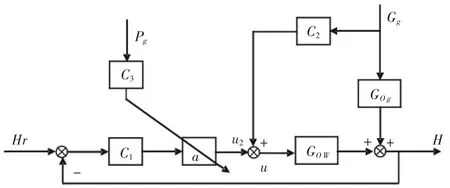
图3 带监督环节的汽包水位模糊前馈—反馈控制系统
将水位偏差、蒸汽流量偏差和汽包压力偏差3路信号作为输入,经模糊推理后,再经过解模糊得到控制数据,控制3个控制器的动作。规则库存储由专家知识和经验归纳总结得到控制规则。
3.1 模糊反馈控制器C1的设计
模糊反馈控制器C1采用常规的模糊控制器,其结构如图4所示。与前述相同,在图4中,k1、k2和k3分别是偏差e、偏差的变化ce和控制作用u的归一化系数。
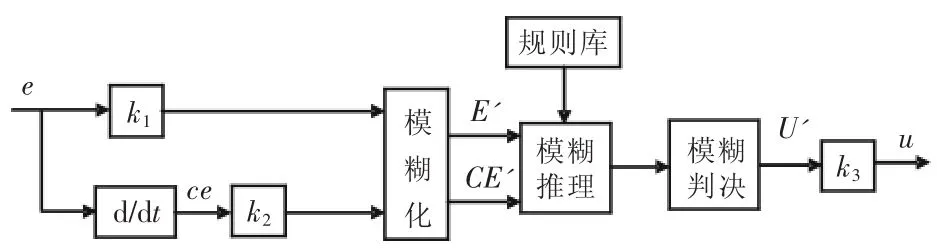
图4 常规模糊控制系统
1)规则库
采用如下模糊控制规则:

这里,i=1,…,7,取e,ce为控制器C1的输入语言变量,语言值集合为:

其意义如下:
L:大;M:中;S:小;N:负;Z:零;P:正同样可以定义输出语言变量u的集合。
2)模糊推理
采用广义肯定式推理(GMP)。
3)模糊化
采用单点模糊化。以偏差e为例,该方法将k时刻测得的ek模糊化成一个特殊的模糊集E,其隶属度函数为:

由于对数据进行了归一化,因此e的论域通常为[-1,1]闭区间,其他变量亦是如此。
4)模糊决策
采用中心平均法,将论域U′上各离散点ui(i=1,…,n)处的隶属度作为权系数进行判决,如下式所示:

至此,完成将模糊形式的输出转化为精确量输出。
综合上述步骤,可以得模糊反馈控制器C1。
3.2 模糊前馈控制器C2的设计
在利用前馈控制来补偿可测干扰影响的过程中,如果能够精确建立控制对象前向通道与干扰通道的数学模型,并假设系统是线性的,则可以通过传递函数来设计动态前馈补偿器。然而对具有较大工况变化的高热负荷的锅炉水位对象来说,要建立精确的数学模型非常难,所以采用可利用实际经验的模糊控制理论和技术是解决这一问题的有效途径。
根据工程实际中Dg对H的影响规律,总结出前馈控制规则,对于静态前馈补偿,前馈控制规则的形式可描述为:

式中,RiC2,i=1,…,m,表示用来描述控制规律的第i条模糊推理规则,m为规则的个数;Fi∈V,i=1,…,m,Gi∈V,i=1,…,m。
与前馈反馈控制器C1的设计类似,利用模糊前馈控制规则,通过清晰化处理,可以得到前馈补偿uC2和增量型补偿ΔuC2。
3.3 监督控制器C3的设计
在反馈控制和前馈控制共同作用下,可以抑制可测的负荷变化ΔDg扰动对锅炉汽包水位H的影响。但是由蒸汽耗量到汽包水位通道中存在非最小相位环节,其动态过程表现为当蒸汽耗量产生变化时,引起汽包压力的变化,即ΔDg>0时,汽包压力的变化为Δp<0,必将导致“虚假水位”的产生,此时,反馈控制器会朝着错误的方向调节,导致汽包水位的振荡。
为此设计一监督控制器C3,通过锅炉汽压p的监测并在汽压变化时产生一监督控制作用uC3,用以抑制“虚假水位”的影响,因为尽管“虚假水位”是由于蒸汽耗量的变化引起,但其变化的剧烈程度却直接与汽包压力的变化有关。
监督控制的基本思想是当汽包压力的变化为零或较小时,监督控制不起作用,这时反馈与前馈控制正常调节;当汽包压力变化比较大时,由于有“虚假水位”的存在,反馈控制给出的控制作用uC1是错误的,此时应削弱uC1,主要利用前馈控制作用uC2来调节。
设pe(k)=p(k)-p(k-1)即汽包压力的变化,它作为监督控制器C3的输入变量,uC3为监督控制器的输出。假定uC3的论域为[0,1]的闭区间,则若uC3=1时,相当于监督控制对模糊反馈控制无削弱作用,而当uC3=0时,相当于将模糊反馈控制切除。根据上述思想,可以建立如下的模糊监督控制规则:
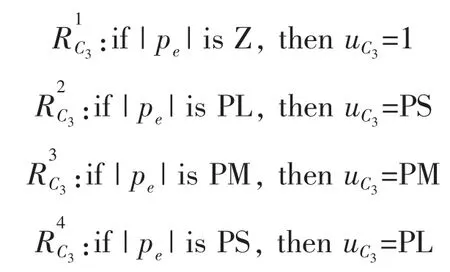
利用上述模糊监督控制规则经清晰化运算,便得到uC3,当锅炉汽包压力发生变化时,uC3的取值应为0<uC3<1,即通过判别压力变化的剧烈程度来决定对反馈控制的修正,有效地抑制了由于“虚假水位”造成控制器误动作而导致控制系统输出的振荡。
4 仿真试验
4.1 计算机仿真
图5是蒸汽负荷为单位阶跃扰动时系统的输出和控制作用,从图中可以看出,仿真试验的结果满足船用主锅炉水位的控制要求。

图5 锅炉水位模糊控制系统在负荷扰动下的响应
4.2 热态仿真
将上述带模糊监督控制的模糊控制律,经简化后置入数字式可编程控制器并构成锅炉汽包水位计算机仿真系统进行了验证研究,该实验机组的锅炉过热蒸汽压力1.8 MPa,水位表的可见范围是±100 mm,在主机负荷变化的情况下考察了模糊控制器作用的汽包水位的变化,数据见表1。
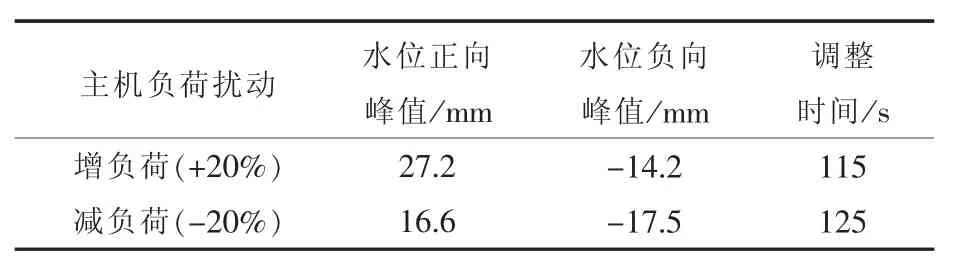
表1 实验数据
研究结果表明,在给定工况下,采用本文的控制方案,系统超调量较小,在主机负荷扰动下,水位的波动在水位表的可见范围内。
5 结语
针对某船用蒸汽锅炉汽包水位控制对象,提出了模糊前馈-反馈的控制方案,其控制律由模糊前馈控制、模糊反馈控制和模糊监督控制3个部分组成,该方案实现了锅炉水位的模糊双冲量控制,将该方案应用于某实验锅炉的汽包水位控制,试验结果表明:该控制方案是可行的,控制品质满足船用蒸汽锅炉汽包水位控制的技术要求。
[1]孙俊.船舶锅炉汽包水位及其专家PID控制系统仿真[J].计算机仿真,2007,24(4):162-164,169.
[2]孙优贤,孙红.锅炉设备自动调节[M].北京:化工出版社,1982.
[3]高俊.锅炉汽包水位模糊控制的应用研究[J].自动化仪表,2003,24(3):56-59.
[4]王东风,韩璞,王国玉.锅炉汽包水位系统的预测函数控制[J].华北电力大学学报,2003,30(3):44-47.
[5]祝和运.过程控制工程[M].北京:化工出版社,2003.
[6]鄢波,丁维明,魏海坤.工业锅炉汽包水位模糊自适应PID控制系统[J].发电设备,2006,20(4):276-279.
[7]杨为民,刘建芳.锅炉汽包水位的Fuzzy控制应用[J].仪器仪表学报,2006(z1):545-546.
[8]周佳,曹小玲,刘永文.锅炉汽包水位控制策略的现状分析[J].锅炉技术,2005,36(3):5-10,71.
[9]ZADEH L A.Fuzzy logic[J].Computer,1998,8(4):83-89.
[10]SEPÙLVEDA R,CASTILLO O.Experimental study of intelligent controllers under uncertainty using type-1 and type-2 fuzzy logic[J].Information Sciences,2007,177(10):2023-2048.
Research on the Fuzzy Controller of Marine Boiler Drum Level
Dong Hai-yun Xiao Hang
College of Naval Architecture and Power,Naval University of Engineering,Wuhan 430033,China
For classical single loop PID control on marine boiler drum level,the disturbance of steam flux can’t be solved.A new fuzzy control with fuzzy supervisor method is put forward,in this method,the fuzzy feed-forward control is applied to transact the impact of measurable disturbance signal,and the fuzzy supervisor is used to adjust the proportion of feed-forward control and feed-back control automatically,the control purpose is carried out.Using this method,the double impulse fuzzy control of a marine boiler drum level is realized.According to the computer and experimentation simulation,the results show that this control strategy is effective and practical,and this method is feasible.
boiler;drum level;fuzzy control
TK223.75
:A
:1673-3185(2009)01-73-04
2008-11-13
董海运(1982-),男,硕士研究生。研究方向:船舶动力及热力系统的监测、控制与故障诊断。
E-mail:dhy92330@sohu.com
肖 航(1963-),男,副教授,博士。研究方向:舰船动力系统监测控制与仿真
