传感器组故障自诊断自修正方法
2007-09-20李发光陈生春
李发光,刘 镇,陈生春
(海军工程大学 船舶与动力学院,武汉430033)
传感器是柴油机状态监测与故障诊断系统中一个至关重要的环节,其工作状态直接决定了诊断结果,但传感器也是最容易出现故障的环节。
由于干扰、增益、偏差等原因引起的测量误差其幅度范围有可能和系统真实故障引起的幅度偏差达到相同的结果,故如未对传感器的输出信号进行处理判断,就对监测系统实施故障诊断,很有可能漏判或误判。为此,有必要建立传感器故障实时监测系统。
传感器常用的故障诊断技术有硬件冗余法和解析冗余法[1],对于系统的状态检测与故障诊断,运用到了大量具有相关性的传感器组群,对与监测相同对象,相同性质的状态参数来说,传感器组群之间具有一定的冗余性,利用冗余性,可以进行传感器的状态判别。
具有传感器故障诊断模块的设备故障诊断框架其基本思想是在故障诊断流程中引入传感器故障诊断模块。
1 RBF神经网络预测器
图1所示为具有传感器故障诊断模块的故障诊断系统。在此系统中,对设备进行实时监测,若系统工作正常,对运行状态参数进行记录和保存,不启用传感器故障诊断模块;若发现系统工作异常,首先启动传感器故障诊断模块,若是传感器故障,修复传感器,否则进行设备故障模式识别。
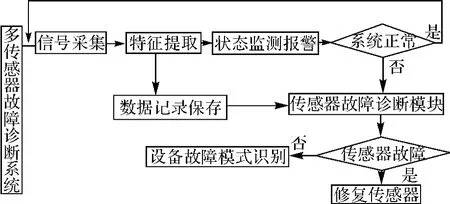
图1 具有传感器故障诊断模块的故障诊断系统
可以看出,其核心是RBF神经网络预测器。
在时间序列的预测领域中,径向基函数RBF(radial basis function)是一种新颖而有效的手段。它不仅具有良好的推广能力,而且计算量小、速度快[2-3]。
RBF神经网络通常是一种两层前向网络,隐层中的基函数使用径向基函数,它对输入激励产生一个局部化的响应,结构见图2。
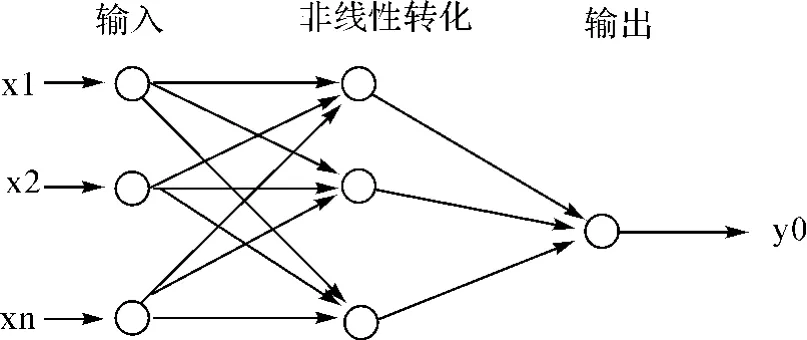
图2 RBF神经网络结构图
运用RBF神经网络对传感器进行故障诊断就是已知传感器当前和过去一段时间内的输出信号,预测传感器在未来某一段时间内的运行状况。对传感器的预测可以转化为数学建模问题,该模型建立在RBF神经网络上。可以将神经网络预报模型用如下预测方程表示:
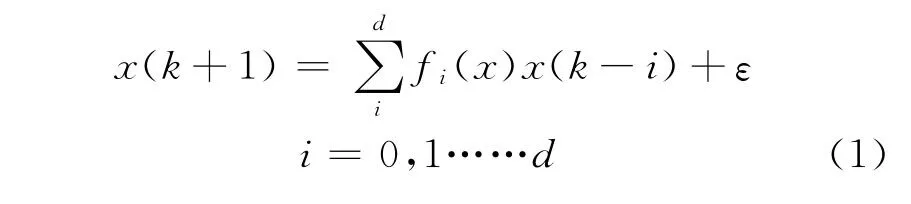
式中:fi(x)——输入变量的非线性函数;
x(k-i)——该时间序列d时间之前的时间序列值;
ε——随机白噪声。
在多步预报时,依据以上所建立的预测模型,可以把预测值代入预报模型,逐步推算出多步的未来值,这样的多步预报过程在获得单步预报结果时,就已经存在着预报误差。为此,若需要进行多步预报,可以增大时间序列d时间之前的时序间隔值,而对此进行单步预测。目前的监测系统大都具有强大的数据库功能,对历史数据时间间隔选择后进行预报,可以大大提高预测精度。
预测器一边不断学习新的数据样本,一边对传感器的下一时刻输出值做出预测,若预测值显著偏离传感器的输出值,有传感器故障和机械设备故障两种可能。因此单纯从误差大小还不能判定该传感器是否发生了故障。由于三向加速度传感器三向之间存在着高度的相关性,利用冗余率,可以对传感器状态进一步做出判断。
2 三向传感器之间冗余性
三向加速度传感器在提供了被测对象在三个方向振动信息的同时,也提供了各向之间的冗余信息。由于冗余性表示多传感器所提供的对象之间的信息是相关的,重复的,故一组具有冗余性的传感器中,若某个传感器发生故障,其与剩余传感器的冗余率必然发生变化,利用一组传感器冗余率的变化可以达到故障诊断的目的。
任意两个传感器x和y对同一对象进行测量,两者之间的冗余性可视为由y接收到有关x的信息量。设有一个连接两个传感器的实际通道,x为该通道的输入,y为其接收到的输出,它们之间的冗余率R可表示为:
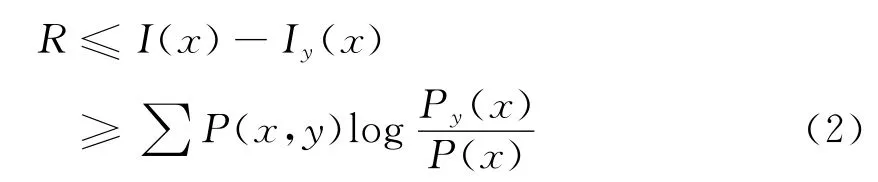
式中:P(x)——x的概率分布;
Py(x)——x的条件概率分布;
P(x,y)——x和y的联合概率分布。
由于实际中联合概率分布难于计算,而如果两个传感器是冗余的,它们之间必然存在着相关性,因而可以从两个传感器输出的相关性来间接判定它们之间的冗余性[4]。
假设两个信号互相关函数的幅值分布概率为P(x),可以定义互相关熵函数为:

它反映了两个信号相关性的大小,由于互相关函数可以用快速傅立叶变换的方法计算,互相关熵的计算得到了大大的简化,因而可作为两个传感器信息冗余性的一种度量。
3 实例分析
在三向加速度传感器工作过程中,若发现系统工作异常,通过传感器故障诊断模块,预测值显著偏离传感器的输出值,有传感器故障和机械设备故障两种可能。通过仿真模拟了某向传感器发生故障情况;通过实际柴油机故障设置,对柴油机底座松动故障进行了实机测试分析。
图4为三向加速度传感器采集到的正常工况下柴油机振动信号图。
设x向加速度传感器的模型为:
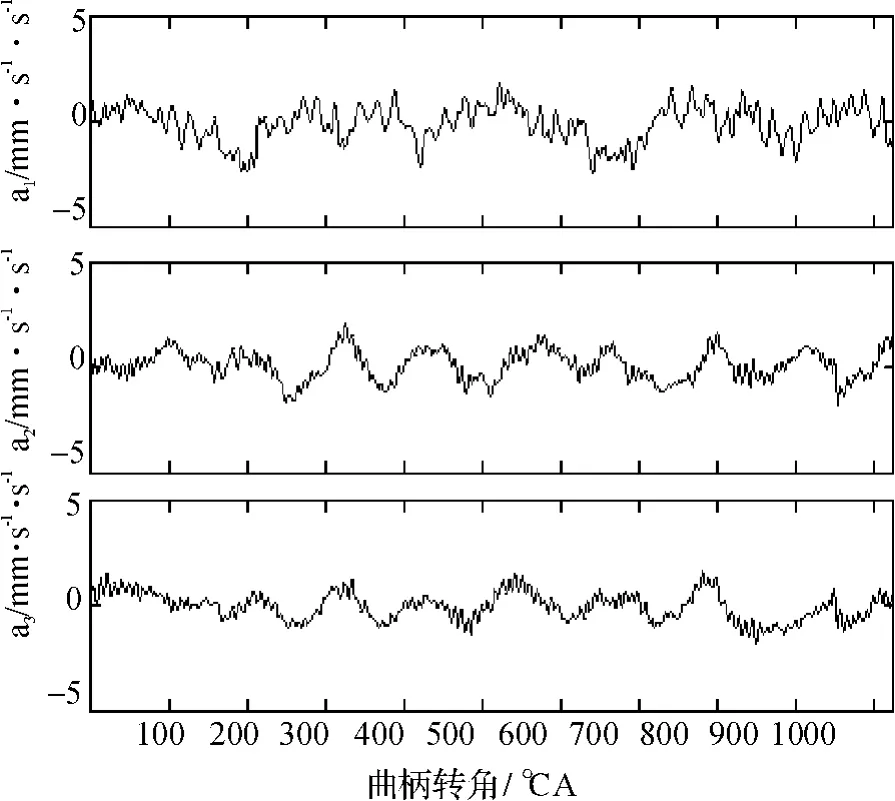
图4 柴油机振动信号图(正常工况)

式中:u——实际测量值;
w——系统的真实状态;
b——测量偏差;
v——测量中存在的噪声。
对x向信号模拟干扰、增益、偏差三种故障,即在原信号基础上,分别对这三向增加故障因子:

式中:k——增益故障,k=2;
bb——偏差故障,bb=0.5;
vv——干扰,vv=0.5sin(sot)
分别计算正常情况下和添加了故障因子情况下各向传感器之间的互相关熵,结果见表1。
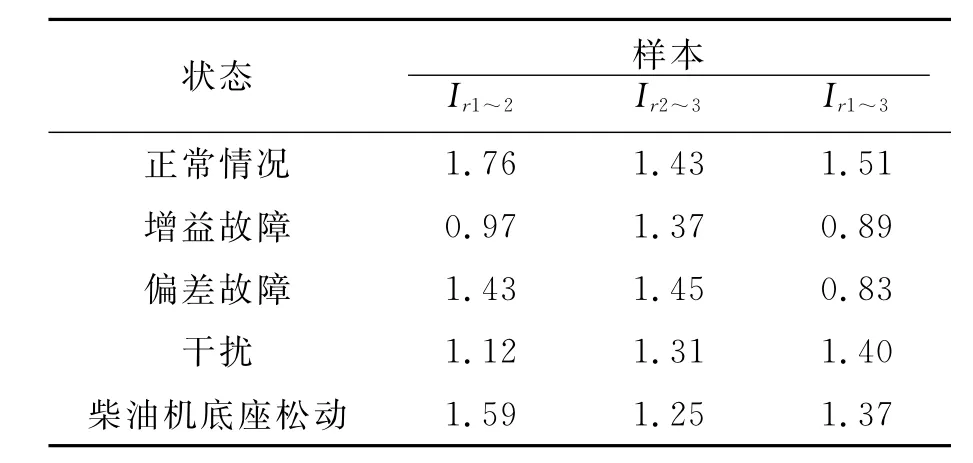
表1 三向传感器之间互相关熵
分析表中Ir值的变化,可以看出,当x向传感器发生故障时,其与另外两向传感器之间的冗余率发生了变化,而没有发生故障的传感器之间的冗余率不变。
图5为三向加速度传感器采集到的柴油机底座松动振动信号图,可以看出其各向传感器之间的冗余率较正常状况是一致变小,且其变化的幅值分别是0.17、0.18和0.14,大致相等。利用这些特点,可以迅速地判断出传感器是否发生故障,并由此做出诊断策略。
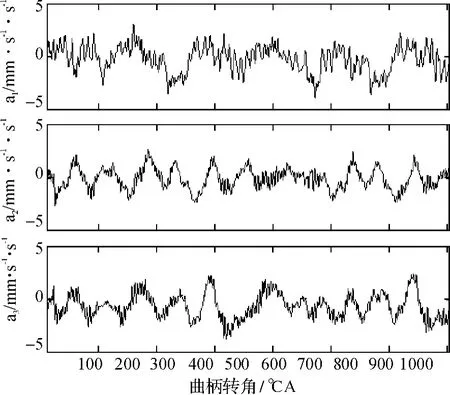
图5 柴油机振动信号图(底座松动)
4 结论
在具有冗余率传感器组设备故障诊断系统中引入传感器故障诊断模块是提高诊断系统可靠性和准确性的一种重要途径。理论分析和实验研究都表明了该方法的可行性。
[1]袁小宏,屈梁生.故障诊断中多传感器信息冗的研究[J].振动测试与诊断,2003,23(1):59~65.
[2]S.Rangwala and D.A.Dornfeld.Sensor Intergration Using Neural Networks for Intelligent Tool Condition Monitoring[J].Journal of Engineering for Industry,1990,112:219~228.
[3]Light W A.Some aspect of radial basis function approximation in approximation theory,spline function and functions[A].NATO ASI series[C].Boston:Kluwer Academic Publishers,1992.
[4]黄向华,孙建国.基于自联想网络的发动机传感器解析余度技术[J].航空动力学报,1999,14(4):433~438.
