基于GSM技术的GPS定位及跟踪系统
2004-03-18林真胡兰馨杨维坚
林 真 胡兰馨 杨维坚
摘要本文阐述了利用现有的GSM网组成对移动目标跟踪的卫星定位系统的理论依据;实施的技术手段。以及GPS移动目标跟踪系统的组成。并且对该系统的硬件设计及软件设计进行了相应的描述。
GPS系统是利用卫星进行测时、测距的系统。GPS的定位方式分为绝对定位和相对定位。GPS相对定位用于大地测量。目的是要测量被测量点相对于某一已知点的位置。不是直接测量被测点在WGS-84地心坐标系的绝对位置。而对于运动的目标瞬间位置和运动速度的测量是采用GPS绝对定位方式。无论那一种方式,都是由GPS同时观测4颗以上的卫星,根据每颗卫星的位置和每颗卫星与被测点的伪距数值,建立伪距定位方程组,通过对方程组求解和进行误差校正运算,得到被测点在WGS-84地心坐标系的坐标,然后转换成‘新1954年北京坐标系的坐标。
对于建立GPS移动目标跟踪系统的关键技术是将GPS发布的广播电文通过通信平台发送出去。实现手段有两种:一是申请专用的频率,建立专用的通信平台;二是利用现有的共用移动通信网络建立通信平台。对于前者,由于频率资源的限制,申请频率将很难,即使申请到了专用的频率,但建系统的费用将很大,用户的使用费用将会很高。由此造成普遍使用的困难。因此,相比之下,后一种手段更为可行。随着GPS组网技术成本的下降、使用成本的下降,以及GPS本身价格的下降,GPS技术在发达国家相当普及,早已进入了民用,但是在中国却一直没有普及,原因之一就是通信平台问题。现在全球移动通信系统(GSM)在我国东部、中部地区,尤其是在城市已经相当普及,因此利用GSM系统作为组成城市的公共汽车调度系统,出租车的调度系统,贵重物品运输车的跟踪系统,机动车防盗系统等通信平台,应该是非常容易的事情。
1.技术手段
以GSM系统为通信平台传送GPS的广播电文有两个途径:一是数据通道,二是语音通道。如果使用GSM数据通道传送GPS的广播电文,移动终端要由终端适配器、 满足CCITTV24协议和V.21至 V.32协议的调制解调器组成。传输速率最高可达到9600bit/s 。移动终端的结构比较复杂,成本高,适用于实时性强、信息量大的传输。
用GSM的语音通道传送GPS的广播电文的方法是将GPS的广播电文转换成音频信号,再由GSM系统将音频信号进行语音编码将其变换成13kbit/s的数字化语音信号,数字信号经过高频调制、功率放大等处理,以电磁波的形式发射到自由空间,经过有关的网络,最后由接收端的天线检测到这个信号,进行语音解码,还原成GPS的广播电文。这种方法传输速度慢,适用于要求数据传输量较少的用户。移动终端可以由现成的GSM手机和数字/音频转换卡组成,结构简单,成本低。

2.移动目标跟踪系统组成
本篇文章介绍的系统由GSM移动端机和显示座机组成,移动端机能将GPS的定位信息转换成话音信号和2FSK信号,通过GSM网送到网络另一端的移动用户的手机、固定用户的听筒或者显示座机中。显示座机将2FSK信号转换成HEX码或ASCII码再经过RS232口接入电子地图平台,直观地显示出被查询设备所处的位置。而对于移动用户和固定用户可以通过语音的播报,直接获得移动目标所处的位置(经度、纬度、椭球、高度)和经度方向、纬度、椭球高度方向移动的速度。
(1)GPS移动端机GPS移动端机的硬件结构如图1所示。其中,GPS25-LP是GRAMIN公司生产的同时跟踪12颗卫星的GPS接收机,从TX1口输出的广播电文为ASCII码NMEA-0183格式或者从TX2口输出二进制的位置数据、伪距和载波相位数据、星历数据。二进制的位置数据格式如附表。

ISD4002-120是数码语音合成芯片,工作于SPI同步串行协议。PIC16C65的8位单片机,有4×8BIT的程序存储区、同步和异步串行通信口、通用的输入输出口、8位和16位的定时器和计数器,并有内置式的看门狗,以及多种中断,同时有很强的抗干扰能力。GPS25-LP与单片机之间的数据交换通过RS232串行通信口。MT8870是DTMF解码器,CMX624是能够检测呼叫的2FSK信号的编码/解码器。CMX624与单片机之间的数据交换是采用同步串行通信方式进行。移动端机提供两种方式传送GPS数据。一种是将GPS的数据通过单片机编译成语音合成芯片中对应的语音信号的地址,通过地址的控制将GPS的数据转换成语音,再通过GSM网用语音方式向用户播报。另一种将GPS的定位数据、历书数据等以ASCII码或HEX码的型式经过RS232口送到PIC16C65,由单片机送到CMX624编码成2FSK信号,以数据的形式通过GSM网传送到端机或用户。2FSK信号的频率范围从300~3000Hz,在音频范围内。目前GSM网采用的在语音编码方案是13kbit/s RPE-LTP码。L2000将音频信号按8kHz取样,按照每20ms划分为一个语音帧,每一帧有160个样值点,延时参数和采样相位值在语音帧中每5ms传一次,每帧为260bit的数据块。因此完整传送一个语音帧包括延时参数和采样相位值至少要25ms。接收端收到语音编码的数据块,经过LPT(长期预测)滤波器和LPC(线性预测)滤波器重组,再经过一个特定的去加重网络加以复原,恢复成语音信号。对于DTMF信号的命令码,每个码长要大于50ms。要使以2FSK方式调制信号在GSM网语音信道无失真传输,且传输误码率限制在万分之一以下,码率应小于600bps 。移动端机自动摘机、挂机的控制电平是单片机通过L2000的免提接口提供。端机工作在主叫状态下的流程图如图2所示,图3为座机工作在被叫状态下的程序流程图。

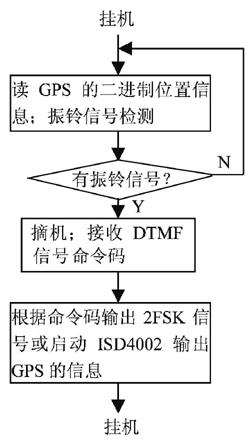
(2)GPS座机硬件结构 GPS座机硬件结构图如图4所示。系统座机由振铃检测、自动摘/挂机控制单元、MT8870、CMX624、,PIC16C65和电子地图平台组成。座机和端机之间采用双向通信。端机定时呼叫座机后,MT8870转换为信号音检测状态检测回铃音。座机的PIC16C65检测到振铃信号,输出自动摘机控制信号,则移动端机测到的信号音为静音,端机随后发送DTMF语音方式命令码,然后启动ISD4002将GPS的信息以语音方式播报,或者将二进制码通过CMX624转换为FSK信号编码发送状态,将GPS的信息以FSK信号方式发送到座机。座机上的CMX624将FSK信号解码送PIC16C65,经过单片机处理后,通过RS-232口将GPS的信息送到电子地图平台。系统座机呼叫移动端机后,CMX624转换为呼叫检测状态检测回铃音。当座机测到的信号音为静音,座机上的CMX624转换为DTMF编码状态,对端机发出‘请求发送的命令码,然后CMX624转换为FSK解码状态,等待接收移动端机发送的GPS信息。座机将收到的GPS信息送到电子地图平台,由电子地图平台把相关的电子地图传送到座机并且调制成FSK信号,通过GSM网发送到移动端机,端机将FSK信号解调和显示相关的电子地图。

这种基于GSM网的GPS卫星定位跟踪系统投资省,维护费用少,易于扩充。
