新型智能钢印机
2004-03-14刘念聪王银芝孙未
刘念聪 王银芝 孙 未
随着科学技术的发展,办公自动化程度的提高,人们对办公设备的要求也越来越高。钢印机有着非常重要的地位,特别是在一些证件发放部门,如大专院校、工厂企业、行政机关等在一定时期内都要印制大量证件。而目前使用的钢印机均为“手动钢印机”,不但操作强度大、效率低,而且存在着钢印质量不稳定、字迹不清晰等缺陷。因此,我们研制了基于光机电一体化技术的智能型钢印机,可以实现自动盖章、工作频率和行程可调、准确定位、自动计数和动态显示的功能,具有智能性、自动化、印痕清晰、稳定可靠、易于拆装和维修的特点,大大地提高了办公自动化水平。
结构及原理
该机主要有打印头装置、机身、支杆、摆杆、连接结以及连接栓等部件以及电气系统和控制系统组成,示意图如图1所示。
其工作原理为:当电磁铁4通电时,衔铁被吸引上升,拉动摆杆7右侧部分向上摆动,在支杆5(即支点)的作用下,摆杆7的另一侧向下运动,从而推动上印章11向下运动,当上下印章与纸张接触并产生5kg左右的相互作用力时,印章过程即可完成。

工作部件的设计及选择
动力元件为了能使印章清晰均匀,该机采用了MQ2-5N-6121型牵引电磁铁作为动力元件。
且其可以根据纸张的厚度来调整摆杆的左侧长度,从而使其取得满意的印章效果。
精确定位 该机在底座上安装了在X、Y轴方向上均可锁定的滑动标尺,在标尺外侧的底座上刻有精度为1mm的刻度尺,该结构在处理盖章任务时,使其能方便定位,取得很好的盖印效果。
行程可调 为了针对厚度不同的证件和机构便于拆装维修,该机在连接节和连接栓部分进行了精心设计,连接节2有一通孔,利用连接栓在通孔两侧的螺母进行锁定。实现行程的可调。
材料选用 从保证结构强度和节约成本的角度出发,该机底座1采用铸钢,支架2采用电焊钢管,其余部件均采用45号钢。
控制系统
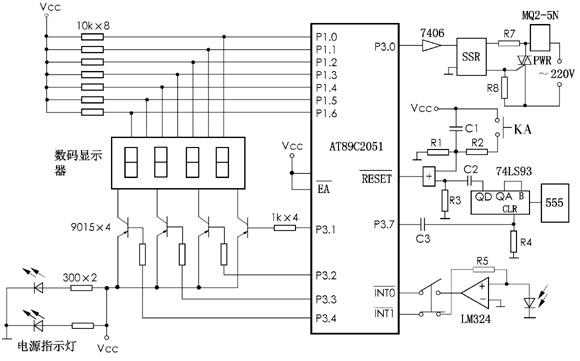
硬件结构及工作原理控制电路中有一联动开关,对应着不同的工作频率,操作者可根据需要选用。当有纸张放进工作台上下印章之间时,下印章12侧的发光二极管发出的光被遮挡,上印章侧11的光敏二极管即产生一个电动势,经放大器LM324放大后,向单片机AT89C2051申请中断,单片机响应中断后,P1.0产生一个高电平,经放大器7406放大后,驱动JGX1F型交流电子继电器接通,从而使得MQ2-5N-6121型电磁铁工作。其控制电路如图2所示。
单片机鉴于单片机I/O口线利用较少和系统控制的特点,CPU选用了ATMEL公司的AT89C2051单片机。
检测电路 检测电路主要由光敏传感器、LM324放大器、反馈电阻R5等组成。系统中,光敏传感器采用国产2CU1A型光敏二极管。
执行电路执行电路由放大器7406、JGX1F型电子继电器、MQ2-5N-6121型电磁铁以及双向可控硅等组成。当加上触发信号时,P3.0输出高电平,电子继电器主回路呈导通状态。系统采用JGX1F型AC-SSR电子继电器。
程序运行监控系统
为了提高系统的抗干扰性,防止程序进入死循环,系统采用计数器构成的WATCHDOG电路。将555接成一个多谐振荡器,周期为t0,将74LS93接成16进制计数器,当数到第8个脉冲时,QD端变成高电平,单片机用P3.7输出清零脉冲,只要每次清零脉冲的时间间隔短于8个脉冲周期,计数器就永远计不到8,QD端保持低电平。当CPU受干扰而掉入死循环时,就不能送出复位脉冲了,计数器很快数到8,QD端立即变为高电平,经过微分电路C2、R3输出一个正脉冲,使CPU复位。该电路CPU有上电复位(C1、R1)、人工复位(KA、R2、R3)和WATCHDOG复位(C2、R3)三个复位信号。通过或门后加到RESET端,74LS93的清零信号为高电平,为防止CPU掉入死循环前将P3.7变为高电平,使WATCHDOG失效,故在P3.7和计数器的清零端之间加一个微分隔离电路。

显示部分系统选用4只七段共阳LED数码管、9015三极管和电阻等组成显示电路。系统检测信号经AT89C2051单片机处理后通过P1口直接驱动LED数码管,LED显示已盖章的证件数目。另外,选用一个红色发光二极管作为电源指示灯。
软件设计 系统软件采用汇编语言编制,包括主程序和中断巡回检测子程序、动态显示子程序。主程序的功能是完成系统自检、系统初始化。系统初始化包括硬件初始化和软件初始化,后者包括对中断的安排、系统时钟的初始化、堆栈的设置、状态变量的初始化等。中断巡回检测程序如图3所示。
由于单片机系统工作在电磁铁的强磁场附近区域,承受强大的干扰,系统除了应用WATCHDOG监控系统外,还采用了软件抗干扰陷阱技术,当CPU受到干扰后,往往将一些操作数当作指令码来执行,引起程序混乱。这时首先要尽快将程序纳入正轨(执行真正的指令系列)。为了对付弹飞的程序自动形成的死循环,系统设立了软件陷阱,将其安排在程序区、表格、未使用的ROM区、未使用的中断向量区。由于软件陷阱都安排在正常程序执行不到的区域,故不会影响程序的执行效率。
