火箭的控制方法
1960-01-19喻统武
喻统武
随着火箭技术的飞跃发展,火箭的飞行距离、速度、有效载荷量、准确度等均达到了很高的程度。现代化的完善的火箭除了要有完善的弹体与发动机外,还要有极为精密的准确的控制系统。控制系统的作用是准确地将火箭引导至目标或保证火箭准确的进入其飞行轨道。
由于火箭控制系统非常复杂与精密,因此从设计到制造出来,其工作量是很大的。对现代化的火箭来说,其控制系统的工作量约占整个火箭工作量的70%。
火箭的控制系统包含与飞机上相似的自动驾驶仪。对飞机来说,自动驾驶仪的任务是在一定程度上代替驾驶员的工作,主要是按照既定的飞行方向与飞行高度将飞机引导至目的地。我们知道,在飞行过程中,驾驶员的工作是这样的:他依靠飞机上的指示仪表与自己的感觉器官,来察觉飞机是否偏离了原来的方向,是否有俯仰或倾斜,然后根据所判断的偏离角度的大小和方向,用手拉动驾驶杆,操纵飞机的方向舵或升降舵或副翼作适当的转动,利用空气动力对于舵及副翼的作用,使飞机的飞行姿态获得修正。为了能够代替驾驶员的工作,自动驾驶仪应该具有能够产生与驾驶员相似动作的机构,因此自动驾驶仪包括有以下几个主要部分:
1.测量机构——用来感受或测量偏离的大小。当它感受到偏离后,便输出相应的偏离信号。一般均用陀螺仪来作测量机构。
2.放大机构——测量机构输出的偏离信号是很微弱的,必须将它加以放大才能应用。我们知道,在收音机中,是利用天线接收下来的微弱的无线电信号,通过电子管放大器加以放大而使扬声器发出声音的。在自动驾驶仪中,可以采用与收音机相似的电子管放大器将偏离信号加以放大。
3.执行机构——它接受放大器输送来的放大了的偏离信号而产生相应的动作,带动飞机的舵或副翼偏转,使飞机的偏离状态获得修正。可以利用小型电动机作为执行机构,即将放大后的偏离信号(电信号)输入电动机。使电动机转动而带动舵或副翼。
自动驾驶仪在飞机上的工作情况可以用下面的简单的方块图表示(图1)。图中各方块之间的箭头表示信号或动作的传递方向。

图1
其中方块1与方块5之间的箭头表示测量机构感受的是飞机的偏离,而方块5与方块4之间的箭头则表示舵或副翼的动作使飞机获得修正。
对火箭控制系统来说,有了上述作用原理的自动驾驶仪以后,还只能使火箭按照原来的方向作稳定的直线飞行,但实际上我们还要求火箭按照人的意志沿一定的轨迹飞行。自动驾驶仪只有在飞机或火箭产生了偏离时才会产生相应的动作,而当飞机或火箭没有偏离时它是不会动作的。若人为地加一控制信号给自动驾驶仪,则它也会使舵偏转,这时飞机或火箭便会偏离原来的方向而飞行。可见通过自动驾驶仪,可以达到控制火箭沿一定轨迹飞行的目的,只需有某一机构来产生控制信号即可。各种火箭控制系统均包含有自动驾驶仪,所不同的只是控制信号的来源不同。按照控制信号的来源,可将火箭控制系统分为三大类:
1.自动控制系统——其控制信号是在火箭弹内产生的,而不需要任何外界的辐射能。这种控制方法主要用于远程导弹、洲际导弹、人造卫星的运载火箭以及宇宙火箭上。它又可以分为两类:
(1)方案自动控制——共控制系统中包含有一方案机构,在地面上事先将已确定的飞行轨迹方案给予方案机构,在飞行过程中,方案机构就能自动的按此方案产生控制信号加到自动驾驶仪中,自动驾驶仪便控制着火箭按此方案飞行。图2所示为事先设计好了的弹道式火箭的飞行轨迹。
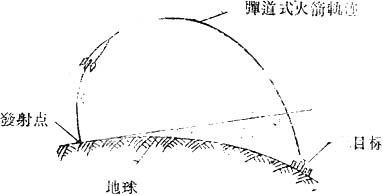
图2
(2)导航自动控制——他是依据外界某一物体作为基准,来判断火箭自己在空间的位置,而目标的位置是已知的,因而也就知道了火箭自己与目标的相对位置,这样就可以产生相应的控制信号,控制火箭飞向目标。导航自动控制包括天文导航、无线电导航、惯性导航等。天文导航是依据天空的星体来判断火箭自己在空间的位置。无线电导航是依据地面导引站发出的无线电波来判断火箭自己在空间的位置。惯性导航是利用弹内加速度表测量出火箭的加速度,然后利用加速度通过一定的机构求出速度,再求出火箭已飞行过的距离,这一距离与已知发射点到目标的距离(利用已知的发射点与目标的经纬度可计算出此一距离)进行比较,当两者的数值达到相同时,便发出控制信号,使导弹俯冲而击中目标。
自动控制的火箭由于发射后便不受地面的控制,而弹内的控制规律又是事先给定的,因而无灵活性,一般只用来攻击静止的目标。但反过来说,由于控制作用在弹内完成,不与外界发生连系,因而不易受到敌人使用的无线电干扰。
2.遥远控制系统——这是在比较远的距离以外对火箭进行控制。这种方法应用得很广泛,主要用于地对空火箭等方面。它又可以分为主要的两类:
(1)波束控制。如图3所示,地面的雷达跟踪着目标,雷达的无线电波束始终指向目标,导弹发射后,首先进入波束,然后沿着波束的中心运动,当它偏离了波束中心,便能在弹内产生适当的控制信号,控制着导弹回到波束中心来,因而最后便能击中目标。
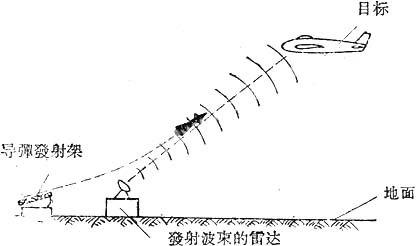
图3
(2)指令控制。如图4所示,搜索雷达搜索到目标后,通知操纵台将火箭发射出去,同时目标跟踪雷达跟踪着目标,火箭跟踪雷达跟踪着火箭,它们分别将目标及火箭的方位和距离等信号输入电子计算机,电子计算机经过迅速的计算后将信号输送到操纵台,操纵台便发出控制信号不断修正火箭的飞行轨迹,最后使火箭击中目标。
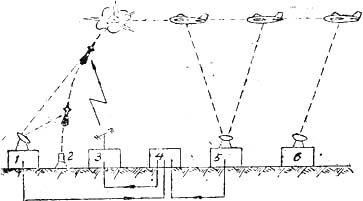
图4
1.导弹跟踪雷达2.发射架3.操纵台4.电子计算机5.目标跟踪雷达6.搜索雷达
遥远控制方法由于可以在火箭飞行中不断对火箭进行修正,因而可以提高火箭的射击准确度,但由于遥远控制主要是利用无线电来实现的,因而容易受到敌人进行的无线电干扰,以致使火箭失去控制。
3.自动瞄准系统——通过装在导弹头部的自动瞄准头随时确定导弹与目标的相对位置,并产生相应的控制信号,控制导弹自动飞向目标。自动瞄准主要用于空对空导弹上,当导弹自截击机上发射以后,不需要任何的外界参预便能飞向目标,因而是完全自动化的。属于自动瞄准的,有以下两种主要的控制系统:
(1)无线电自动瞄准系统。其中自动瞄准头是一个雷达,它向目标发射电磁波,此电磁波由目标反射回来又为自己接受,从而得出目标对导弹的相对位置,并产生相应的控制信号,控制着导弹飞向目标,如图5所示。
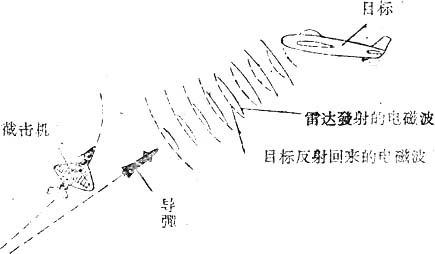
图5
(2)热瞄准系统。我们知道,喷气式飞机喷出的气体、工厂与军舰的锅炉均有热辐射。热瞄准系统中的自动瞄准头能感受目标热辐射的红外线,因而便能确定目标与导弹的相对位置,并产生相应的控制信号,控制着导弹飞向目标,如图6所示。
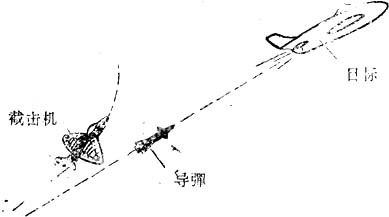
图6
自动瞄准系统的准确度,随着与目标的渐渐接近而提高,这对攻击空中活动目标来说是有利的。但一般的说,其作用距离不远,因而只有用于空对空导弹才最为合适。
导弹的控制方法是很多的,以上所说的只是一些主要的方法。在具体应用中,往往不是采用单独的一种控制方法,而是几种控制方法同时使用。例如对于地对空导弹来说,在飞行的初始段采用遥远控制,而在快要接近目标时采用自动瞄准,则可以达到更好的效果。
